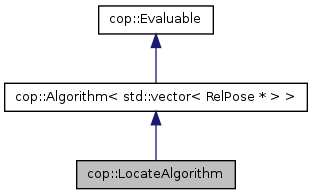
Specialisation of algoithms that return a 3d position as an result. More...
#include <LocateAlgorithm.h>
Public Member Functions | |
| virtual double | CheckSignature (const Signature &object, const std::vector< Sensor * > &sensors) |
| evaluate shortly of the signature contains necessary model information to perform the algorithm | |
| LocateAlgorithm () | |
| virtual std::vector< RelPose * > | Perform (std::vector< Sensor * > sensors, RelPose *pose, Signature &Object, int &numOfObjects, double &qualityMeasure)=0 |
| the function that is called to execute this current algorithm | |
| virtual XMLTag * | Save ()=0 |
| saves the algorithms name and a parameter set | |
| virtual void | SetData (XMLTag *tag) |
| virtual bool | TrackingPossible (const Reading &img, const Signature &sig, RelPose *pose) |
| virtual | ~LocateAlgorithm () |
Static Public Member Functions | |
| static LocateAlgorithm * | LocAlgFactory (XMLTag *tag) |
Specialisation of algoithms that return a 3d position as an result.
class LocateAlgorithm
Definition at line 40 of file LocateAlgorithm.h.
| cop::LocateAlgorithm::LocateAlgorithm | ( | ) | [inline] |
Constructor
Definition at line 52 of file LocateAlgorithm.h.
| virtual cop::LocateAlgorithm::~LocateAlgorithm | ( | ) | [inline, virtual] |
Destructor
Definition at line 57 of file LocateAlgorithm.h.
| virtual double cop::LocateAlgorithm::CheckSignature | ( | const Signature & | object, |
| const std::vector< Sensor * > & | sensors | ||
| ) | [inline, virtual] |
evaluate shortly of the signature contains necessary model information to perform the algorithm
CheckSignature
| object | the signature that has to be checked |
| sensors | a list of available sensors seeing the target area |
Implements cop::Evaluable.
Definition at line 69 of file LocateAlgorithm.h.
| LocateAlgorithm * LocateAlgorithm::LocAlgFactory | ( | XMLTag * | tag | ) | [static] |
Definition at line 40 of file LocateAlgorithm.cpp.
| virtual std::vector<RelPose*> cop::LocateAlgorithm::Perform | ( | std::vector< Sensor * > | sensors, |
| RelPose * | pose, | ||
| Signature & | Object, | ||
| int & | numOfObjects, | ||
| double & | qualityMeasure | ||
| ) | [pure virtual] |
the function that is called to execute this current algorithm
Perform
| cam | list of cameras available for locating |
| pose | current pose hypothesis that could be used for search space restriction |
| Object | Description of the object to search for and the receiver of information updates |
| numOfObjects | number of objects that should be found and on return that were found |
Implements cop::Algorithm< std::vector< RelPose * > >.
| virtual XMLTag* cop::LocateAlgorithm::Save | ( | ) | [pure virtual] |
| virtual void cop::LocateAlgorithm::SetData | ( | XMLTag * | tag | ) | [inline, virtual] |
Definition at line 73 of file LocateAlgorithm.h.
| bool LocateAlgorithm::TrackingPossible | ( | const Reading & | img, |
| const Signature & | sig, | ||
| RelPose * | pose | ||
| ) | [virtual] |
Definition at line 60 of file LocateAlgorithm.cpp.

