Confidence-Based Autonomy (CBA) implementation for ROS. More...
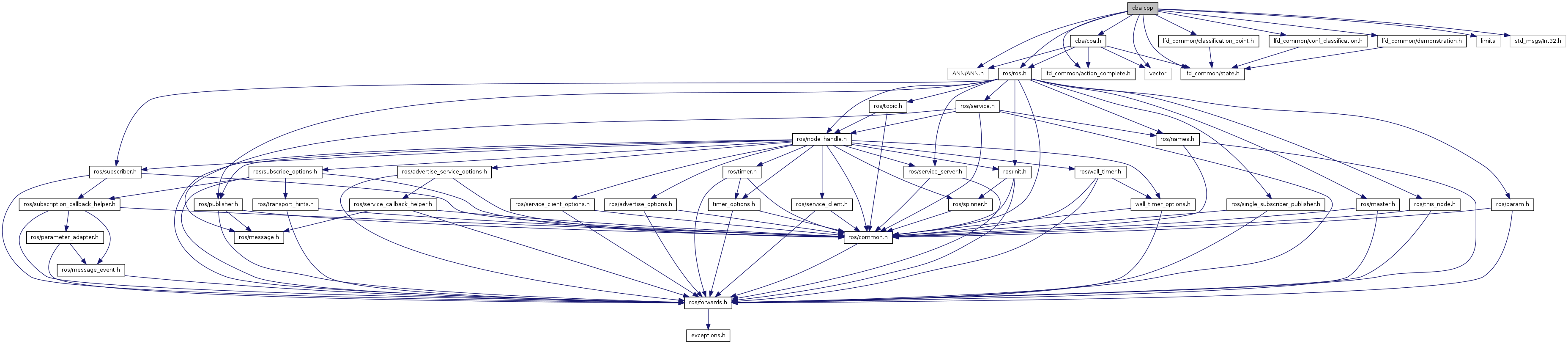
#include <ANN/ANN.h>#include <cba/cba.h>#include <lfd_common/action_complete.h>#include <lfd_common/classification_point.h>#include <lfd_common/conf_classification.h>#include <lfd_common/demonstration.h>#include <lfd_common/state.h>#include <limits>#include <ros/ros.h>#include <std_msgs/Int32.h>#include <vector>
Include dependency graph for cba.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
Confidence-Based Autonomy (CBA) implementation for ROS.
cba provides and implementation of the Learning from Demonstration algorithm Confidence-Based Autonomy (CBA) built for ROS.
- Date:
- December 19, 2011
Definition in file cba.cpp.