Base class for gimpact shapes. More...
#include <btGImpactShape.h>
Public Member Functions | |
| btGImpactShapeInterface () | |
| void | getAabb (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| If the Bounding box is not updated, then this class attemps to calculate it. | |
| SIMD_FORCE_INLINE const btAABB & | getLocalBox () |
| Obtains the local box, which is the global calculated box of the total of subshapes. | |
| virtual const btVector3 & | getLocalScaling () const |
| virtual int | getShapeType () const |
| virtual void | postUpdate () |
| Tells to this object that is needed to refit the box set. | |
| virtual void | processAllTriangles (btTriangleCallback *callback, const btVector3 &aabbMin, const btVector3 &aabbMax) const |
| Function for retrieve triangles. | |
| virtual void | rayTest (const btVector3 &rayFrom, const btVector3 &rayTo, btCollisionWorld::RayResultCallback &resultCallback) const |
| virtual method for ray collision | |
| virtual void | setLocalScaling (const btVector3 &scaling) |
| virtual void | setMargin (btScalar margin) |
| SIMD_FORCE_INLINE void | updateBound () |
| performs refit operation | |
| virtual eGIMPACT_SHAPE_TYPE | getGImpactShapeType () const =0 |
| Base method for determinig which kind of GIMPACT shape we get. | |
| SIMD_FORCE_INLINE btGImpactBoxSet * | getBoxSet () |
| gets boxset | |
| SIMD_FORCE_INLINE bool | hasBoxSet () const |
| Determines if this class has a hierarchy structure for sorting its primitives. | |
| virtual const btPrimitiveManagerBase * | getPrimitiveManager () const =0 |
| Obtains the primitive manager. | |
| virtual int | getNumChildShapes () const =0 |
| Gets the number of children. | |
| virtual bool | childrenHasTransform () const =0 |
| if true, then its children must get transforms. | |
| virtual bool | needsRetrieveTriangles () const =0 |
| Determines if this shape has triangles. | |
| virtual bool | needsRetrieveTetrahedrons () const =0 |
| Determines if this shape has tetrahedrons. | |
| virtual void | getBulletTriangle (int prim_index, btTriangleShapeEx &triangle) const =0 |
| virtual void | getBulletTetrahedron (int prim_index, btTetrahedronShapeEx &tetrahedron) const =0 |
| virtual void | lockChildShapes () const |
| call when reading child shapes | |
| virtual void | unlockChildShapes () const |
| SIMD_FORCE_INLINE void | getPrimitiveTriangle (int index, btPrimitiveTriangle &triangle) const |
| if this trimesh | |
| virtual void | getChildAabb (int child_index, const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| Retrieves the bound from a child. | |
| virtual btCollisionShape * | getChildShape (int index)=0 |
| Gets the children. | |
| virtual const btCollisionShape * | getChildShape (int index) const =0 |
| Gets the child. | |
| virtual btTransform | getChildTransform (int index) const =0 |
| Gets the children transform. | |
| virtual void | setChildTransform (int index, const btTransform &transform)=0 |
| Sets the children transform. | |
Protected Member Functions | |
| virtual void | calcLocalAABB () |
Protected Attributes | |
| btVector3 | localScaling |
| btGImpactBoxSet | m_box_set |
| btAABB | m_localAABB |
| bool | m_needs_update |
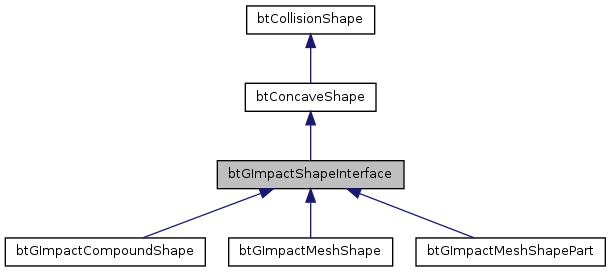
Base class for gimpact shapes.
Definition at line 78 of file btGImpactShape.h.
| btGImpactShapeInterface::btGImpactShapeInterface | ( | ) | [inline] |
Definition at line 106 of file btGImpactShape.h.
| virtual void btGImpactShapeInterface::calcLocalAABB | ( | ) | [inline, protected, virtual] |
use this function for perfofm refit in bounding boxes
Reimplemented in btGImpactMeshShape.
Definition at line 88 of file btGImpactShape.h.
| virtual bool btGImpactShapeInterface::childrenHasTransform | ( | ) | const [pure virtual] |
if true, then its children must get transforms.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| void btGImpactShapeInterface::getAabb | ( | const btTransform & | t, |
| btVector3 & | aabbMin, | ||
| btVector3 & | aabbMax | ||
| ) | const [inline, virtual] |
If the Bounding box is not updated, then this class attemps to calculate it.
Implements btCollisionShape.
Definition at line 133 of file btGImpactShape.h.
gets boxset
Definition at line 195 of file btGImpactShape.h.
| virtual void btGImpactShapeInterface::getBulletTetrahedron | ( | int | prim_index, |
| btTetrahedronShapeEx & | tetrahedron | ||
| ) | const [pure virtual] |
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual void btGImpactShapeInterface::getBulletTriangle | ( | int | prim_index, |
| btTriangleShapeEx & | triangle | ||
| ) | const [pure virtual] |
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual void btGImpactShapeInterface::getChildAabb | ( | int | child_index, |
| const btTransform & | t, | ||
| btVector3 & | aabbMin, | ||
| btVector3 & | aabbMax | ||
| ) | const [inline, virtual] |
Retrieves the bound from a child.
Reimplemented in btGImpactMeshShape, and btGImpactCompoundShape.
Definition at line 248 of file btGImpactShape.h.
| virtual btCollisionShape* btGImpactShapeInterface::getChildShape | ( | int | index | ) | [pure virtual] |
Gets the children.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual const btCollisionShape* btGImpactShapeInterface::getChildShape | ( | int | index | ) | const [pure virtual] |
Gets the child.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual btTransform btGImpactShapeInterface::getChildTransform | ( | int | index | ) | const [pure virtual] |
Gets the children transform.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual eGIMPACT_SHAPE_TYPE btGImpactShapeInterface::getGImpactShapeType | ( | ) | const [pure virtual] |
Base method for determinig which kind of GIMPACT shape we get.
Subshape member functions
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| SIMD_FORCE_INLINE const btAABB& btGImpactShapeInterface::getLocalBox | ( | ) | [inline] |
Obtains the local box, which is the global calculated box of the total of subshapes.
Definition at line 148 of file btGImpactShape.h.
| virtual const btVector3& btGImpactShapeInterface::getLocalScaling | ( | ) | const [inline, virtual] |
Implements btCollisionShape.
Reimplemented in btGImpactMeshShapePart.
Definition at line 168 of file btGImpactShape.h.
| virtual int btGImpactShapeInterface::getNumChildShapes | ( | ) | const [pure virtual] |
Gets the number of children.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual const btPrimitiveManagerBase* btGImpactShapeInterface::getPrimitiveManager | ( | ) | const [pure virtual] |
Obtains the primitive manager.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| SIMD_FORCE_INLINE void btGImpactShapeInterface::getPrimitiveTriangle | ( | int | index, |
| btPrimitiveTriangle & | triangle | ||
| ) | const [inline] |
if this trimesh
Definition at line 239 of file btGImpactShape.h.
| virtual int btGImpactShapeInterface::getShapeType | ( | ) | const [inline, virtual] |
Reimplemented from btCollisionShape.
Definition at line 154 of file btGImpactShape.h.
| SIMD_FORCE_INLINE bool btGImpactShapeInterface::hasBoxSet | ( | ) | const [inline] |
Determines if this class has a hierarchy structure for sorting its primitives.
Definition at line 201 of file btGImpactShape.h.
| virtual void btGImpactShapeInterface::lockChildShapes | ( | ) | const [inline, virtual] |
call when reading child shapes
Reimplemented in btGImpactMeshShape, and btGImpactMeshShapePart.
Definition at line 230 of file btGImpactShape.h.
| virtual bool btGImpactShapeInterface::needsRetrieveTetrahedrons | ( | ) | const [pure virtual] |
Determines if this shape has tetrahedrons.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual bool btGImpactShapeInterface::needsRetrieveTriangles | ( | ) | const [pure virtual] |
Determines if this shape has triangles.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual void btGImpactShapeInterface::postUpdate | ( | ) | [inline, virtual] |
Tells to this object that is needed to refit the box set.
Reimplemented in btGImpactMeshShape.
Definition at line 142 of file btGImpactShape.h.
| virtual void btGImpactShapeInterface::processAllTriangles | ( | btTriangleCallback * | callback, |
| const btVector3 & | aabbMin, | ||
| const btVector3 & | aabbMax | ||
| ) | const [inline, virtual] |
Function for retrieve triangles.
It gives the triangles in local space
Implements btConcaveShape.
Reimplemented in btGImpactMeshShape, and btGImpactMeshShapePart.
Definition at line 286 of file btGImpactShape.h.
| virtual void btGImpactShapeInterface::rayTest | ( | const btVector3 & | rayFrom, |
| const btVector3 & | rayTo, | ||
| btCollisionWorld::RayResultCallback & | resultCallback | ||
| ) | const [inline, virtual] |
virtual method for ray collision
Reimplemented in btGImpactMeshShape.
Definition at line 277 of file btGImpactShape.h.
| virtual void btGImpactShapeInterface::setChildTransform | ( | int | index, |
| const btTransform & | transform | ||
| ) | [pure virtual] |
Sets the children transform.
Implemented in btGImpactMeshShape, btGImpactMeshShapePart, and btGImpactCompoundShape.
| virtual void btGImpactShapeInterface::setLocalScaling | ( | const btVector3 & | scaling | ) | [inline, virtual] |
Implements btCollisionShape.
Reimplemented in btGImpactMeshShape, and btGImpactMeshShapePart.
Definition at line 162 of file btGImpactShape.h.
| virtual void btGImpactShapeInterface::setMargin | ( | btScalar | margin | ) | [inline, virtual] |
Reimplemented from btConcaveShape.
Reimplemented in btGImpactMeshShape, and btGImpactMeshShapePart.
Definition at line 174 of file btGImpactShape.h.
| virtual void btGImpactShapeInterface::unlockChildShapes | ( | ) | const [inline, virtual] |
Reimplemented in btGImpactMeshShape, and btGImpactMeshShapePart.
Definition at line 234 of file btGImpactShape.h.
| SIMD_FORCE_INLINE void btGImpactShapeInterface::updateBound | ( | ) | [inline] |
performs refit operation
Updates the entire Box set of this shape.
Definition at line 122 of file btGImpactShape.h.
btVector3 btGImpactShapeInterface::localScaling [protected] |
Definition at line 83 of file btGImpactShape.h.
btGImpactBoxSet btGImpactShapeInterface::m_box_set [protected] |
Definition at line 84 of file btGImpactShape.h.
btAABB btGImpactShapeInterface::m_localAABB [protected] |
Definition at line 81 of file btGImpactShape.h.
bool btGImpactShapeInterface::m_needs_update [protected] |
Definition at line 82 of file btGImpactShape.h.

