#include <blort_ros/pose_util.h>
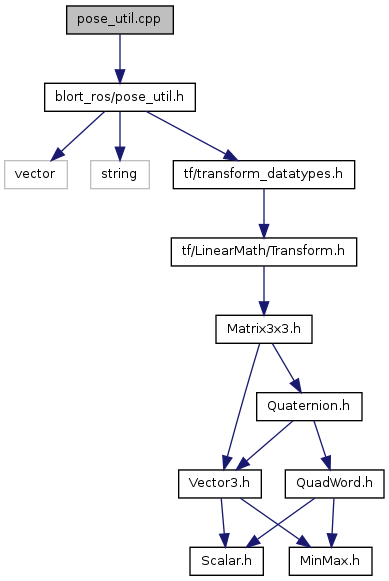
Include dependency graph for pose_util.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | pal_vision_util |
Functions | |
| geometry_msgs::Pose | pal_vision_util::blortPosesToRosPose (geometry_msgs::Pose reference, geometry_msgs::Pose target) |
| pal_blort specific helper function. Given the pose of the BLORT reference frame and the tracked object frame it returns a geometry_msgs::Pose corresponding to the pose of the tracked object in the camera frame | |
| tf::Transform | pal_vision_util::rosPose2TfTransform (const geometry_msgs::Pose &pose) |
| converts from geometry_msgs::Pose to tf::Transform | |
| geometry_msgs::Pose | pal_vision_util::tfTransform2RosPose (const tf::Transform &transform) |
| converts from tf::Transform to geometry_msgs::Pose | |