#include <stdint.h>#include <config.h>#include <utils/ardrone_gen_ids.h>#include <ardrone_tool/ardrone_version.h>#include <ardrone_tool/ardrone_tool.h>#include <ardrone_tool/ardrone_tool_configuration.h>#include <ardrone_tool/Com/config_com.h>#include <ardrone_tool/UI/ardrone_input.h>#include <ardrone_tool/Video/video_com_stage.h>#include <ardrone_tool/Control/ardrone_control.h>#include <ardrone_tool/Navdata/ardrone_navdata_client.h>#include <ardrone_tool/Video/video_stage.h>#include <ardrone_tool/Video/video_recorder_pipeline.h>#include <ardrone_tool/Video/video_stage_latency_estimation.h>#include "ardrone_driver.h"
Include dependency graph for ardrone_sdk.h:

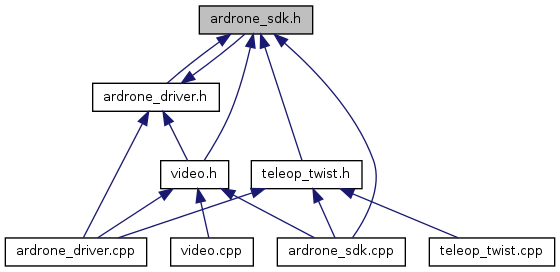
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Defines | |
| #define | NB_DRIVER_POST_STAGES 10 |
Variables | |
| int32_t | looprate |
| vp_os_mutex_t | navdata_lock |
| bool | realtime_navdata |
| bool | realtime_video |
| ARDroneDriver * | rosDriver |
| ros::Time | shared_navdata_receive_time |
| navdata_unpacked_t * | shared_raw_navdata |
| int32_t | should_exit |
| vp_os_mutex_t | twist_lock |
| video_decoder_config_t | vec |
| vp_os_mutex_t | video_lock |
Define Documentation
| #define NB_DRIVER_POST_STAGES 10 |
Definition at line 48 of file ardrone_sdk.h.
Variable Documentation
| int32_t looprate |
Definition at line 17 of file ardrone_sdk.cpp.
| vp_os_mutex_t navdata_lock |
Definition at line 9 of file ardrone_sdk.cpp.
| bool realtime_navdata |
Definition at line 18 of file ardrone_sdk.cpp.
| bool realtime_video |
Definition at line 19 of file ardrone_sdk.cpp.
Definition at line 15 of file ardrone_sdk.cpp.
| ros::Time shared_navdata_receive_time |
Definition at line 7 of file ardrone_sdk.cpp.
| navdata_unpacked_t* shared_raw_navdata |
Definition at line 6 of file ardrone_sdk.cpp.
| int32_t should_exit |
Definition at line 21 of file ardrone_sdk.cpp.
| vp_os_mutex_t twist_lock |
Definition at line 11 of file ardrone_sdk.cpp.
| video_decoder_config_t vec |
| vp_os_mutex_t video_lock |
Definition at line 10 of file ardrone_sdk.cpp.