#include <list>#include "BHand/BHand.h"#include "allgroCANProtocol.h"#include <libpcan.h>#include <fcntl.h>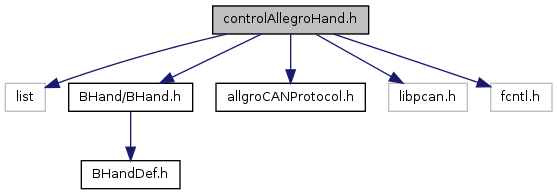
Go to the source code of this file.
Classes | |
| class | controlAllegroHand |
Defines | |
| #define | ALLEGRO_CONTROL_TIME_INTERVAL 0.003 |
| #define | PWM_LIMIT_FAR 190.0*1.5 |
| #define | PWM_LIMIT_MIDDLE 300.0*1.5 |
| #define | PWM_LIMIT_NEAR 450.0*1.5 |
| #define | PWM_LIMIT_ROLL 250.0*1.5 |
| #define | PWM_LIMIT_THUMB_FAR 180.0*1.5 |
| #define | PWM_LIMIT_THUMB_MIDDLE 180.0*1.5 |
| #define | PWM_LIMIT_THUMB_NEAR 270.0*1.5 |
| #define | PWM_LIMIT_THUMB_ROLL 350.0*1.5 |
| #define ALLEGRO_CONTROL_TIME_INTERVAL 0.003 |
Definition at line 17 of file controlAllegroHand.h.
| #define PWM_LIMIT_FAR 190.0*1.5 |
Definition at line 22 of file controlAllegroHand.h.
| #define PWM_LIMIT_MIDDLE 300.0*1.5 |
Definition at line 21 of file controlAllegroHand.h.
| #define PWM_LIMIT_NEAR 450.0*1.5 |
Definition at line 20 of file controlAllegroHand.h.
| #define PWM_LIMIT_ROLL 250.0*1.5 |
Definition at line 19 of file controlAllegroHand.h.
| #define PWM_LIMIT_THUMB_FAR 180.0*1.5 |
Definition at line 27 of file controlAllegroHand.h.
| #define PWM_LIMIT_THUMB_MIDDLE 180.0*1.5 |
Definition at line 26 of file controlAllegroHand.h.
| #define PWM_LIMIT_THUMB_NEAR 270.0*1.5 |
Definition at line 25 of file controlAllegroHand.h.
| #define PWM_LIMIT_THUMB_ROLL 350.0*1.5 |
Definition at line 24 of file controlAllegroHand.h.

