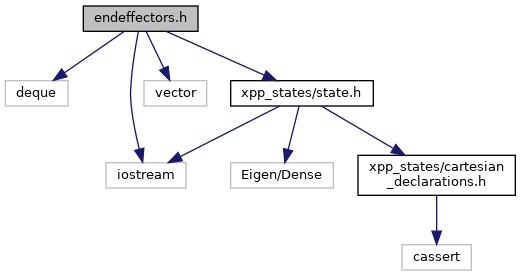
Include dependency graph for endeffectors.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | xpp::Endeffectors< T > |
| Data structure to assign values to each endeffector. More... | |
| class | xpp::EndeffectorsContact |
| Bundles the contact state of all endeffectors. More... | |
| class | xpp::EndeffectorsMotion |
| Bundles the position, velocity and acceleration of all endeffectors. as well as appending a EndeffectorMotion specific convenience function. More... | |
Namespaces | |
| xpp | |
Typedefs | |
| using | xpp::EndeffectorID = uint |
| using | xpp::EndeffectorsAcc = Endeffectors< Eigen::Vector3d > |
| using | xpp::EndeffectorsPos = Endeffectors< Eigen::Vector3d > |
| using | xpp::EndeffectorsVel = Endeffectors< Eigen::Vector3d > |
Functions | |
| template<typename T > | |
| std::ostream & | xpp::operator<< (std::ostream &stream, Endeffectors< T > endeffectors) |