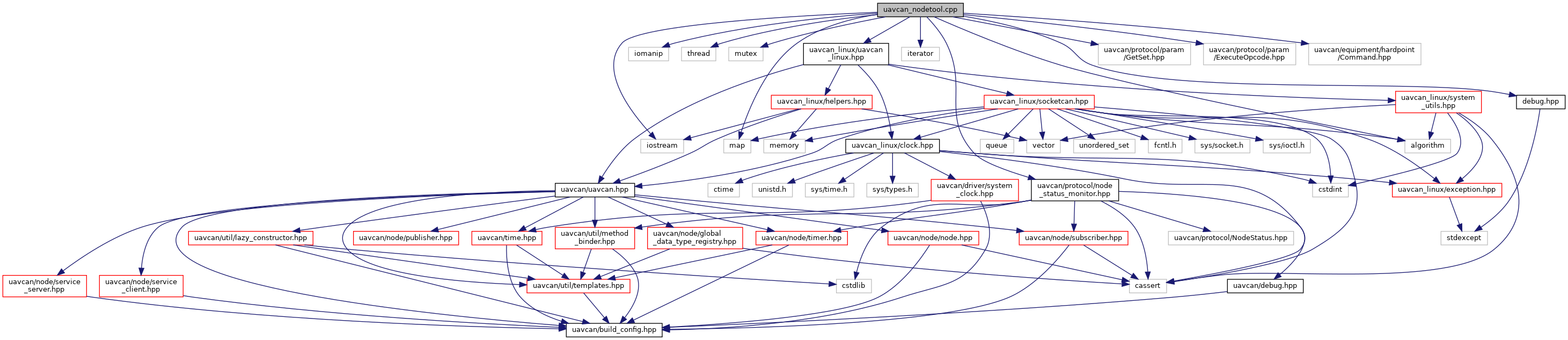
#include <iostream>#include <iomanip>#include <thread>#include <mutex>#include <map>#include <algorithm>#include <iterator>#include <uavcan_linux/uavcan_linux.hpp>#include <uavcan/protocol/node_status_monitor.hpp>#include "debug.hpp"#include <uavcan/protocol/param/GetSet.hpp>#include <uavcan/protocol/param/ExecuteOpcode.hpp>#include <uavcan/equipment/hardpoint/Command.hpp>
Include dependency graph for uavcan_nodetool.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, const char **argv) |
Function Documentation
◆ main()
Definition at line 280 of file uavcan_nodetool.cpp.