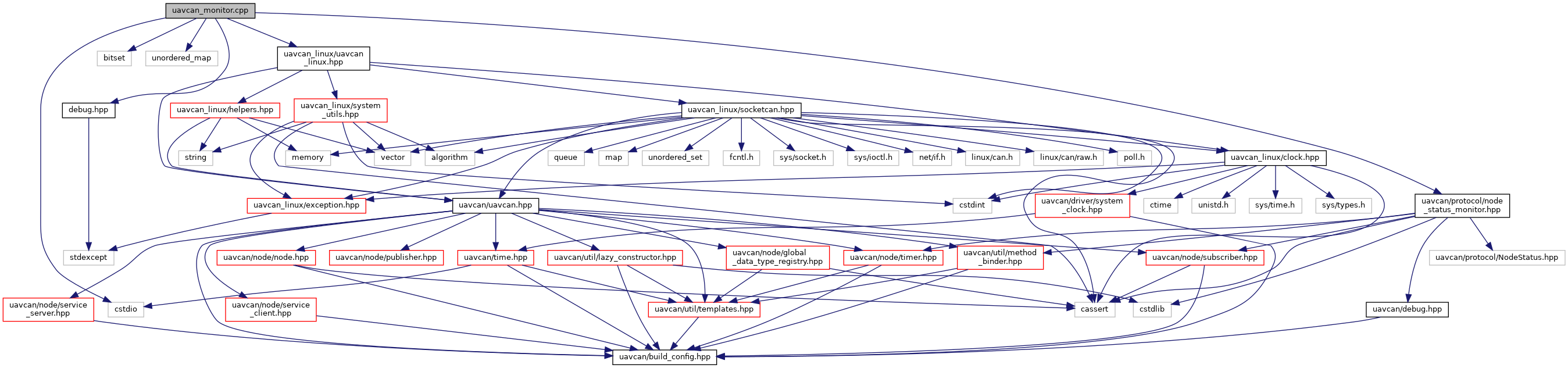
#include <cstdio>#include <bitset>#include <unordered_map>#include <uavcan_linux/uavcan_linux.hpp>#include <uavcan/protocol/node_status_monitor.hpp>#include "debug.hpp"
Include dependency graph for uavcan_monitor.cpp:
Go to the source code of this file.
Classes | |
| class | CLIColorizer |
| class | Monitor |
Enumerations | |
| enum | CLIColor : unsigned { CLIColor::Red = 31, CLIColor::Green = 32, CLIColor::Yellow = 33, CLIColor::Blue = 34, CLIColor::Magenta = 35, CLIColor::Cyan = 36, CLIColor::White = 37, CLIColor::Default = 39 } |
Functions | |
| static uavcan_linux::NodePtr | initNodeInPassiveMode (const std::vector< std::string > &ifaces, const std::string &node_name) |
| int | main (int argc, const char **argv) |
| static void | runForever (const uavcan_linux::NodePtr &node) |
Enumeration Type Documentation
◆ CLIColor
|
strong |
| Enumerator | |
|---|---|
| Red | |
| Green | |
| Yellow | |
| Blue | |
| Magenta | |
| Cyan | |
| White | |
| Default | |
Definition at line 12 of file uavcan_monitor.cpp.
Function Documentation
◆ initNodeInPassiveMode()
|
static |
Definition at line 138 of file uavcan_monitor.cpp.
◆ main()
Definition at line 160 of file uavcan_monitor.cpp.
◆ runForever()
|
static |
Definition at line 146 of file uavcan_monitor.cpp.