Interface for propagating a given map on a set of transmissions. More...
#include <transmission_interface.h>
Public Member Functions | |
| HandleType | getHandle (const std::string &name) |
Real-Time Safe Functions | |
| void | propagate () |
| Propagate the transmission maps of all managed handles. More... | |
 Public Member Functions inherited from hardware_interface::ResourceManager< HandleType > Public Member Functions inherited from hardware_interface::ResourceManager< HandleType > | |
| ResourceHandle | getHandle (const std::string &name) |
| std::vector< std::string > | getNames () const |
| void | registerHandle (const ResourceHandle &handle) |
| Public Member Functions inherited from hardware_interface::ResourceManagerBase | |
| virtual | ~ResourceManagerBase ()=default |
Additional Inherited Members | |
| Public Types inherited from hardware_interface::ResourceManager< HandleType > | |
| typedef ResourceManager< ResourceHandle > | ResourceManagerType |
| Static Public Member Functions inherited from hardware_interface::ResourceManager< HandleType > | |
| static void | concatManagers (std::vector< ResourceManagerType * > &managers, ResourceManagerType *result) |
| Protected Types inherited from hardware_interface::ResourceManager< HandleType > | |
| typedef std::map< std::string, ResourceHandle > | ResourceMap |
| Protected Attributes inherited from hardware_interface::ResourceManager< HandleType > | |
| ResourceMap | resource_map_ |
Detailed Description
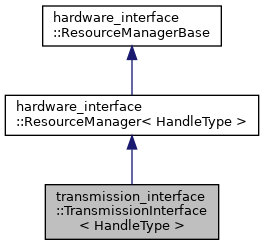
template<class HandleType>
class transmission_interface::TransmissionInterface< HandleType >
Interface for propagating a given map on a set of transmissions.
This map can consist of a single variable (eg. actuator to joint efforts, as implemented by ActuatorToJointEffortHandle) or multiple variables (eg. joint to actuator position, velocity and effort, as implemented by JointToActuatorStateHandle).
The set of transmissions handled by this interface can be heterogeneous, (eg. an arm with a four-bar-linkage in the shoulder, a differential in the wrist, and simple reducers elsewhere).
- Template Parameters
-
HandleType Transmission handle type. Must implement the following methods:
Definition at line 384 of file transmission_interface.h.
Member Function Documentation
◆ getHandle()
|
inline |
Definition at line 388 of file transmission_interface.h.
◆ propagate()
|
inline |
Propagate the transmission maps of all managed handles.
Definition at line 404 of file transmission_interface.h.
The documentation for this class was generated from the following file: