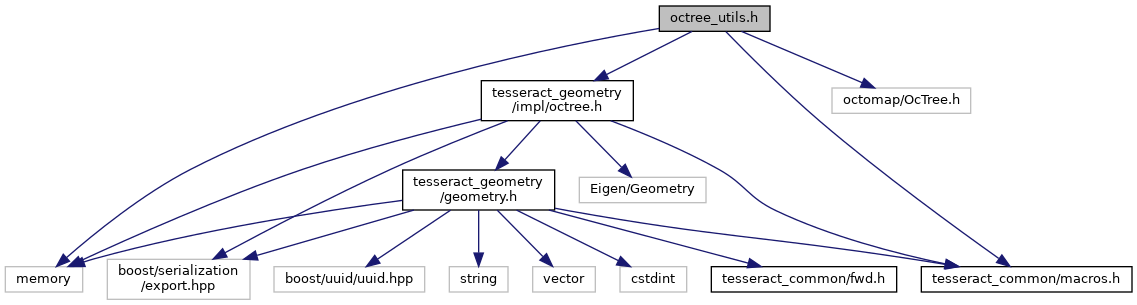
#include <tesseract_common/macros.h>#include <octomap/OcTree.h>#include <memory>#include <tesseract_geometry/impl/octree.h>
Include dependency graph for octree_utils.h:
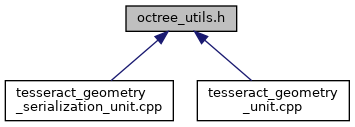
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | tesseract_geometry::PointCloud::Point |
| struct | tesseract_geometry::PointCloud |
| A basic point cloud structure to leverage instead of PCL. More... | |
Namespaces | |
| tesseract_geometry | |
Functions | |
| template<typename PointT > | |
| std::unique_ptr< octomap::OcTree > | tesseract_geometry::createOctree (const PointT &point_cloud, const double resolution, const bool prune, const bool binary=true) |