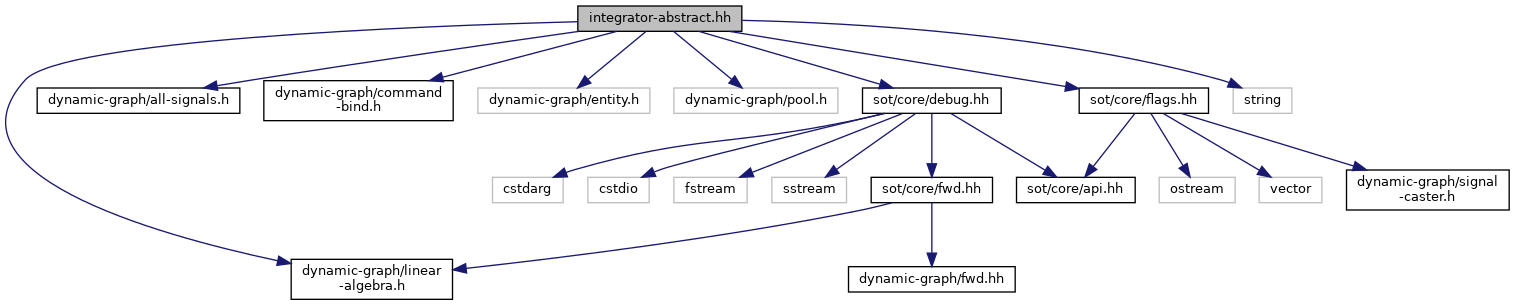
#include <dynamic-graph/linear-algebra.h>#include <dynamic-graph/all-signals.h>#include <dynamic-graph/command-bind.h>#include <dynamic-graph/entity.h>#include <dynamic-graph/pool.h>#include <sot/core/debug.hh>#include <sot/core/flags.hh>#include <string>
Include dependency graph for integrator-abstract.hh:
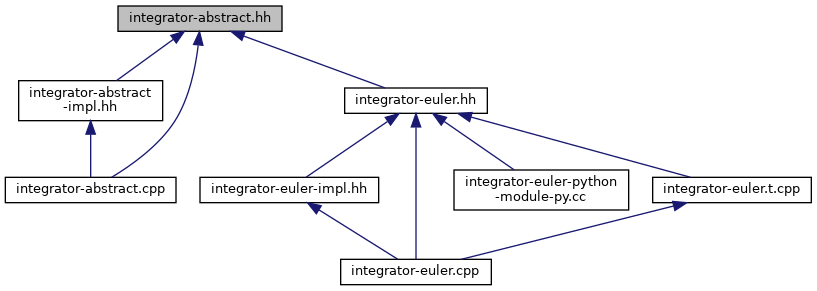
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dynamicgraph::sot::IntegratorAbstract< sigT, coefT > |
| integrates an ODE. If Y is the output and X the input, the following equation is integrated: a_p * d(p)Y / dt^p + .... + a_0 Y = b_m * d(m)X / dt^m + ... . b_0 X a_i are the coefficients of the denominator of the associated transfer function between X and Y, while the b_i are those of the numerator. More... | |
Namespaces | |
| dynamicgraph | |
| dynamicgraph::sot | |