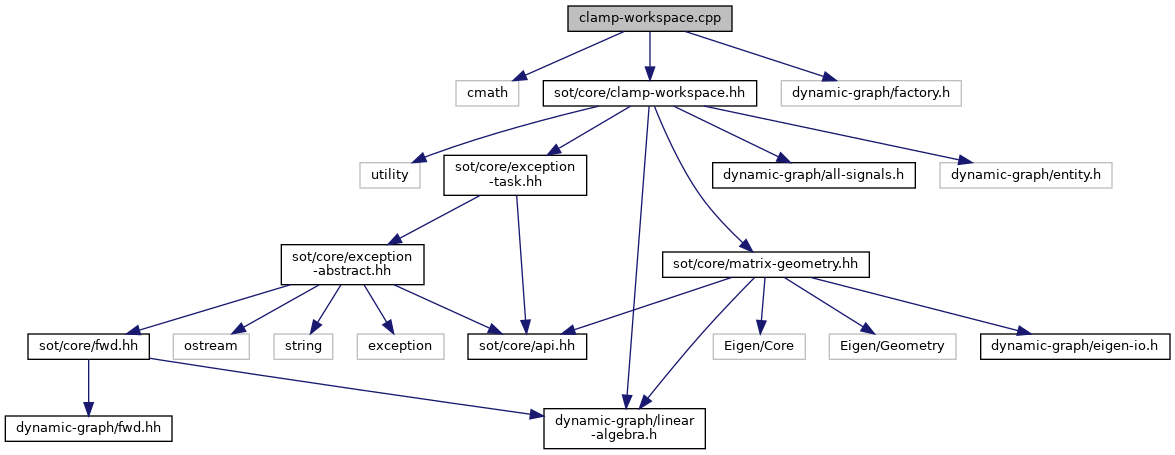
Include dependency graph for clamp-workspace.cpp:
Go to the source code of this file.
Functions | |
| DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN (ClampWorkspace, "ClampWorkspace") | |
Function Documentation
◆ DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN()
| DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN | ( | ClampWorkspace | , |
| "ClampWorkspace" | |||
| ) |