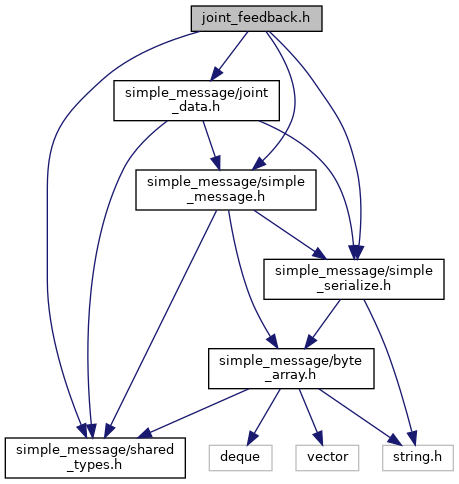
#include "simple_message/joint_data.h"#include "simple_message/simple_message.h"#include "simple_message/simple_serialize.h"#include "simple_message/shared_types.h"
Include dependency graph for joint_feedback.h:
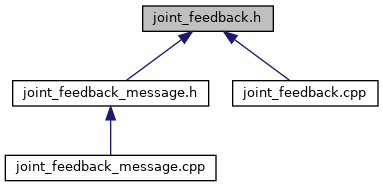
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | industrial::joint_feedback::JointFeedback |
| Class encapsulated joint feedback data. This data represents the current state of each robot joint, including position/velocity/acceleration. The specific interpretation of this data (actual vs. commanded, timestamp, etc.) is up to the robot-controller implementation. More... | |
Namespaces | |
| industrial | |
| industrial::joint_feedback | |
| industrial::joint_feedback::ValidFieldTypes | |
Typedefs | |
| typedef ValidFieldTypes::ValidFieldType | industrial::joint_feedback::ValidFieldType |