Implementation of a class to parse common SDH related command line options. More...
#include <getopt.h>#include <assert.h>#include <iostream>#include <fstream>#include "sdh/sdh.h"#include "sdh/sdhlibrary_settings.h"#include "sdh/release.h"#include "sdh/dsa.h"#include "sdhoptions.h"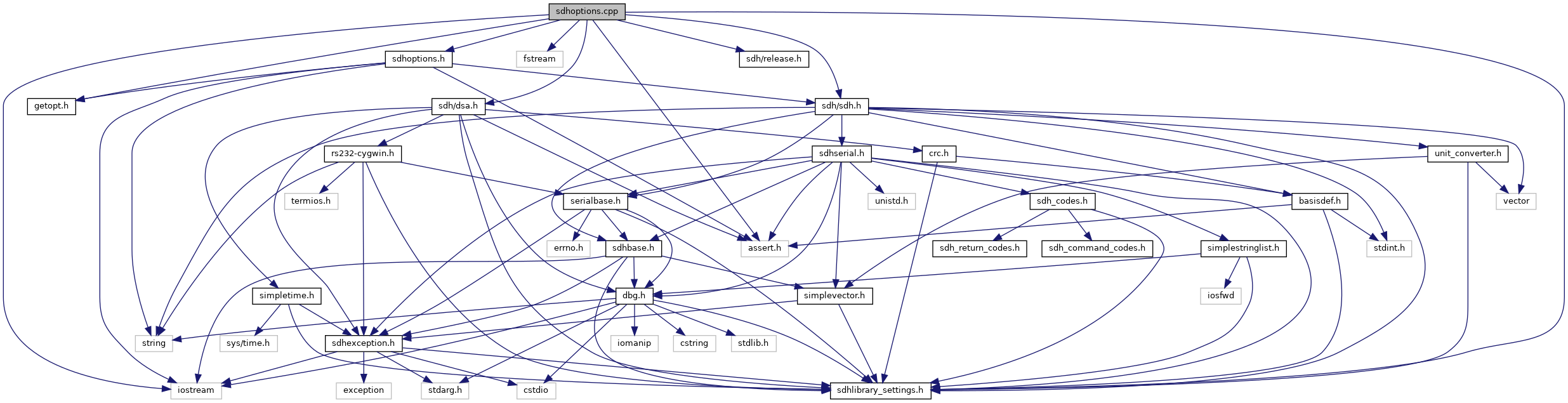
Go to the source code of this file.
Macros | |
| #define | STRINGIFY(_s) #_s |
| helper macro for XSTRINGIFY, see there More... | |
| #define | XSTRINGIFY(_x) STRINGIFY(_x) |
Variables | |
| static struct option | sdhoptions_long_options [] |
| long command line options accepted by the cSDHOptions class More... | |
| static char const * | sdhoptions_short_options = "hvVd:l:p:T:b:cn:e:w:RFt:q:r:fSCM:" |
| short command line options accepted by the cSDHOptions class More... | |
| static char const * | sdhusage_dsaadjust |
| DSA (tactile sensor) adjustment options. More... | |
| static char const * | sdhusage_dsacom |
| DSA (tactile sensor) communication options. More... | |
| static char const * | sdhusage_dsaother |
| DSA (tactile sensor) other options. More... | |
| static char const * | sdhusage_general |
| general options More... | |
| static char const * | sdhusage_sdhcom_cancommon |
| Common CAN communication options. More... | |
| static char const * | sdhusage_sdhcom_common |
| Common communication options. More... | |
| static char const * | sdhusage_sdhcom_esdcan |
| ESD CAN communication options. More... | |
| static char const * | sdhusage_sdhcom_peakcan |
| PEAK CAN communication options. More... | |
| static char const * | sdhusage_sdhcom_serial |
| RS232 communication options. More... | |
| static char const * | sdhusage_sdhcom_tcp |
| TCP communication options. More... | |
| static char const * | sdhusage_sdhother |
| Other options. More... | |
Detailed Description
Implementation of a class to parse common SDH related command line options.
- Date
- 2008-05-05
Copyright
Copyright (c) 2008 SCHUNK GmbH & Co. KG
Definition in file sdhoptions.cpp.
Macro Definition Documentation
◆ STRINGIFY
| #define STRINGIFY | ( | _s | ) | #_s |
helper macro for XSTRINGIFY, see there
Definition at line 72 of file sdhoptions.cpp.
◆ XSTRINGIFY
| #define XSTRINGIFY | ( | _x | ) | STRINGIFY(_x) |
macro for stringification of _x
allows to stringify the value of a macro:
Definition at line 69 of file sdhoptions.cpp.
Variable Documentation
◆ sdhoptions_long_options
|
static |
long command line options accepted by the cSDHOptions class
Definition at line 312 of file sdhoptions.cpp.
◆ sdhoptions_short_options
|
static |
short command line options accepted by the cSDHOptions class
Definition at line 310 of file sdhoptions.cpp.
◆ sdhusage_dsaadjust
|
static |
DSA (tactile sensor) adjustment options.
Definition at line 264 of file sdhoptions.cpp.
◆ sdhusage_dsacom
|
static |
DSA (tactile sensor) communication options.
Definition at line 212 of file sdhoptions.cpp.
◆ sdhusage_dsaother
|
static |
DSA (tactile sensor) other options.
Definition at line 240 of file sdhoptions.cpp.
◆ sdhusage_general
|
static |
general options
Definition at line 80 of file sdhoptions.cpp.
◆ sdhusage_sdhcom_cancommon
|
static |
◆ sdhusage_sdhcom_common
|
static |
Common communication options.
Definition at line 126 of file sdhoptions.cpp.
◆ sdhusage_sdhcom_esdcan
|
static |
◆ sdhusage_sdhcom_peakcan
|
static |
◆ sdhusage_sdhcom_serial
|
static |
RS232 communication options.
Definition at line 109 of file sdhoptions.cpp.
◆ sdhusage_sdhcom_tcp
|
static |
TCP communication options.
Definition at line 180 of file sdhoptions.cpp.
◆ sdhusage_sdhother
|
static |
Other options.
Definition at line 193 of file sdhoptions.cpp.