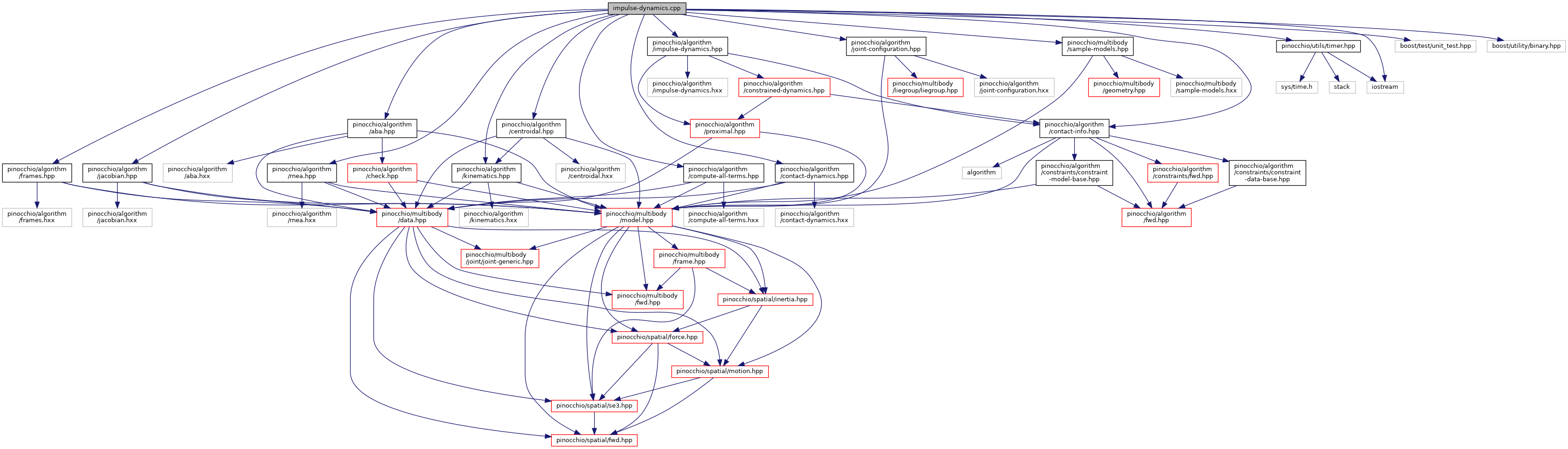
#include "pinocchio/algorithm/aba.hpp"#include "pinocchio/algorithm/rnea.hpp"#include "pinocchio/algorithm/frames.hpp"#include "pinocchio/algorithm/jacobian.hpp"#include "pinocchio/algorithm/centroidal.hpp"#include "pinocchio/algorithm/kinematics.hpp"#include "pinocchio/algorithm/contact-info.hpp"#include "pinocchio/algorithm/compute-all-terms.hpp"#include "pinocchio/algorithm/impulse-dynamics.hpp"#include "pinocchio/algorithm/contact-dynamics.hpp"#include "pinocchio/algorithm/joint-configuration.hpp"#include "pinocchio/multibody/sample-models.hpp"#include "pinocchio/utils/timer.hpp"#include <iostream>#include <boost/test/unit_test.hpp>#include <boost/utility/binary.hpp>
Include dependency graph for unittest/impulse-dynamics.cpp:
Go to the source code of this file.
Functions | |
| BOOST_AUTO_TEST_CASE (test_sparse_impulse_dynamics_empty) | |
| BOOST_AUTO_TEST_CASE (test_sparse_impulse_dynamics_in_contact_6D_3D) | |
| BOOST_AUTO_TEST_CASE (test_sparse_impulse_dynamics_in_contact_6D_LOCAL) | |
| BOOST_AUTO_TEST_CASE (test_sparse_impulse_dynamics_in_contact_6D_LOCAL_WORLD_ALIGNED) | |
Function Documentation
◆ BOOST_AUTO_TEST_CASE() [1/4]
| BOOST_AUTO_TEST_CASE | ( | test_sparse_impulse_dynamics_empty | ) |
Definition at line 26 of file unittest/impulse-dynamics.cpp.
◆ BOOST_AUTO_TEST_CASE() [2/4]
| BOOST_AUTO_TEST_CASE | ( | test_sparse_impulse_dynamics_in_contact_6D_3D | ) |
Definition at line 338 of file unittest/impulse-dynamics.cpp.
◆ BOOST_AUTO_TEST_CASE() [3/4]
| BOOST_AUTO_TEST_CASE | ( | test_sparse_impulse_dynamics_in_contact_6D_LOCAL | ) |
Definition at line 64 of file unittest/impulse-dynamics.cpp.
◆ BOOST_AUTO_TEST_CASE() [4/4]
| BOOST_AUTO_TEST_CASE | ( | test_sparse_impulse_dynamics_in_contact_6D_LOCAL_WORLD_ALIGNED | ) |
Definition at line 199 of file unittest/impulse-dynamics.cpp.