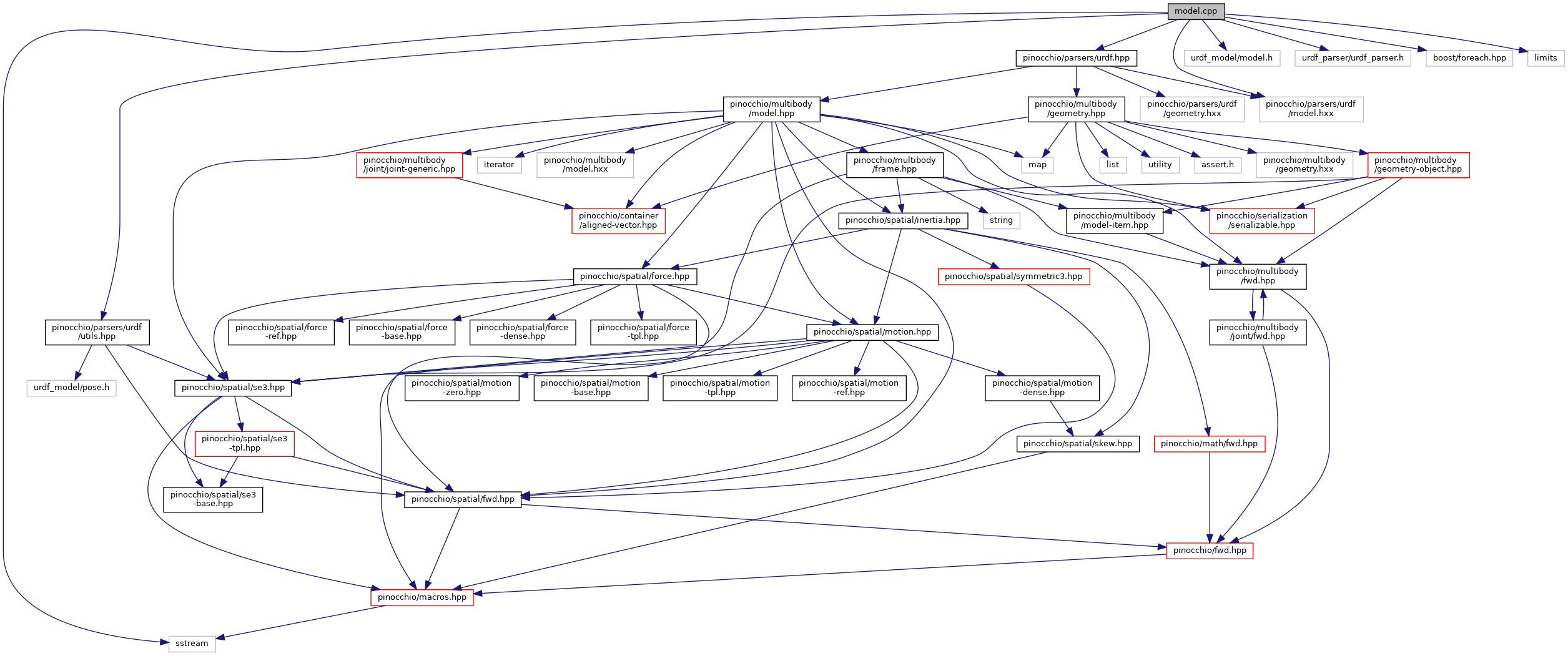
#include "pinocchio/parsers/urdf.hpp"#include "pinocchio/parsers/urdf/utils.hpp"#include "pinocchio/parsers/urdf/model.hxx"#include <urdf_model/model.h>#include <urdf_parser/urdf_parser.h>#include <sstream>#include <boost/foreach.hpp>#include <limits>
Include dependency graph for src/parsers/urdf/model.cpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::urdf | |
| URDF parsing. | |
| pinocchio::urdf::details | |
Functions | |
| static Inertia | pinocchio::urdf::details::convertFromUrdf (const ::urdf::Inertial &Y) |
| Convert URDF Inertial quantity to Spatial Inertia. More... | |
| static Inertia | pinocchio::urdf::details::convertFromUrdf (const ::urdf::InertialSharedPtr &Y) |
| static FrameIndex | pinocchio::urdf::details::getParentLinkFrame (const ::urdf::LinkConstSharedPtr link, UrdfVisitorBase &model) |
| void | pinocchio::urdf::details::parseRootTree (const ::urdf::ModelInterface *urdfTree, UrdfVisitorBase &model, const bool mimic) |
| Parse a tree with a specific root joint linking the model to the environment. The function returns an exception as soon as a necessary Inertia or Joint information are missing. More... | |
| void | pinocchio::urdf::details::parseRootTree (const std::string &filename, UrdfVisitorBase &model, const bool mimic) |
| void | pinocchio::urdf::details::parseRootTreeFromXML (const std::string &xmlString, UrdfVisitorBase &model, const bool mimic) |
| void | pinocchio::urdf::details::parseTree (::urdf::LinkConstSharedPtr link, UrdfVisitorBase &model, const bool mimic) |
| Recursive procedure for reading the URDF tree. The function returns an exception as soon as a necessary Inertia or Joint information are missing. More... | |