#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/geometry.hpp"#include "pinocchio/parsers/srdf.hxx"
Include dependency graph for parsers/srdf.hpp:
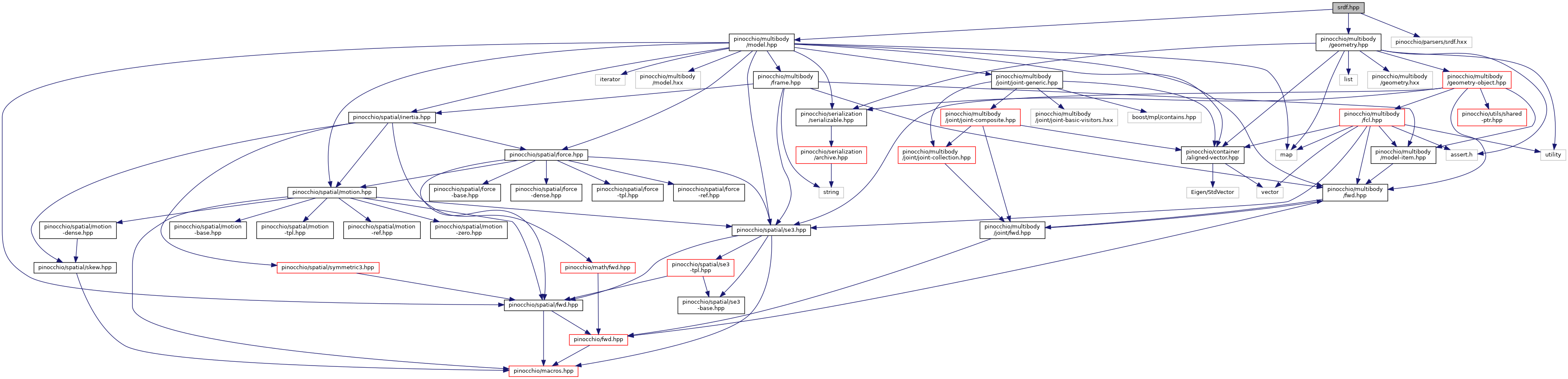
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::srdf | |
| SRDF parsing. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::srdf::loadReferenceConfigurations (ModelTpl< Scalar, Options, JointCollectionTpl > &model, const std::string &filename, const bool verbose=false) |
| Get the reference configurations of a given model associated to a SRDF file. It throws if the SRDF file is incorrect. The reference configurations are saved in a map indexed by the configuration name (model.referenceConfigurations). More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::srdf::loadReferenceConfigurationsFromXML (ModelTpl< Scalar, Options, JointCollectionTpl > &model, std::istream &xmlStream, const bool verbose=false) |
| Get the reference configurations of a given model associated to a SRDF file. It throws if the SRDF file is incorrect. The reference configurations are saved in a map indexed by the configuration name (model.referenceConfigurations). More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| bool | pinocchio::srdf::loadRotorParameters (ModelTpl< Scalar, Options, JointCollectionTpl > &model, const std::string &filename, const bool verbose=false) |
| Load the rotor params of a given model associated to a SRDF file. It throws if the SRDF file is incorrect. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::srdf::removeCollisionPairs (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, GeometryModel &geom_model, const std::string &filename, const bool verbose=false) |
| Deactive all possible collision pairs mentioned in the SRDF file. It throws if the SRDF file is incorrect. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::srdf::removeCollisionPairsFromXML (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, GeometryModel &geom_model, const std::string &xmlString, const bool verbose=false) |
| Deactive all possible collision pairs mentioned in the SRDF file. More... | |