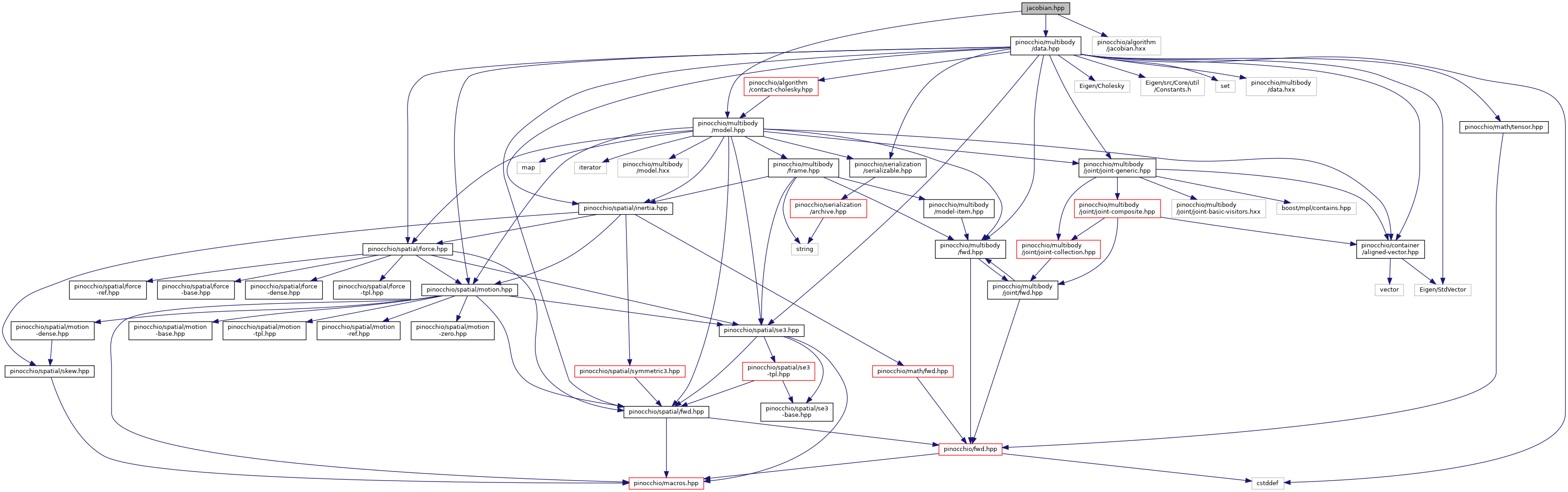
#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/data.hpp"#include "pinocchio/algorithm/jacobian.hxx"
Include dependency graph for jacobian.hpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename Matrix6Like > | |
| void | pinocchio::computeJointJacobian (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const JointIndex joint_id, const Eigen::MatrixBase< Matrix6Like > &J) |
| Computes the Jacobian of a specific joint frame expressed in the local frame of the joint and store the result in the input argument J. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Matrix6x & | pinocchio::computeJointJacobians (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data) |
| Computes the full model Jacobian, i.e. the stack of all motion subspace expressed in the world frame. The result is accessible through data.J. This function assumes that pinocchio::forwardKinematics has been called before. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Matrix6x & | pinocchio::computeJointJacobians (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q) |
| Computes the full model Jacobian, i.e. the stack of all motion subspace expressed in the world frame. The result is accessible through data.J. This function computes also the forwardKinematics of the model. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Matrix6x & | pinocchio::computeJointJacobiansTimeVariation (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v) |
| Computes the full model Jacobian variations with respect to time. It corresponds to dJ/dt which depends both on q and v. The result is accessible through data.dJ. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| Eigen::Matrix< Scalar, 6, Eigen::Dynamic, Options > | pinocchio::getJointJacobian (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex joint_id, const ReferenceFrame reference_frame) |
| Computes the Jacobian of a specific joint frame expressed either in the world (rf = WORLD) frame, in the local world aligned (rf = LOCAL_WORLD_ALIGNED) frame or in the local frame (rf = LOCAL) of the joint. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6Like > | |
| void | pinocchio::getJointJacobian (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex joint_id, const ReferenceFrame reference_frame, const Eigen::MatrixBase< Matrix6Like > &J) |
| Computes the Jacobian of a specific joint frame expressed in one of the pinocchio::ReferenceFrame options. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6Like > | |
| void | pinocchio::getJointJacobianTimeVariation (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex joint_id, const ReferenceFrame reference_frame, const Eigen::MatrixBase< Matrix6Like > &dJ) |
| Computes the Jacobian time variation of a specific joint frame expressed either in the world frame (rf = WORLD), in the local world aligned (rf = LOCAL_WORLD_ALIGNED) frame or in the local frame (rf = LOCAL) of the joint. More... | |