#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/data.hpp"#include "pinocchio/algorithm/frames-derivatives.hxx"
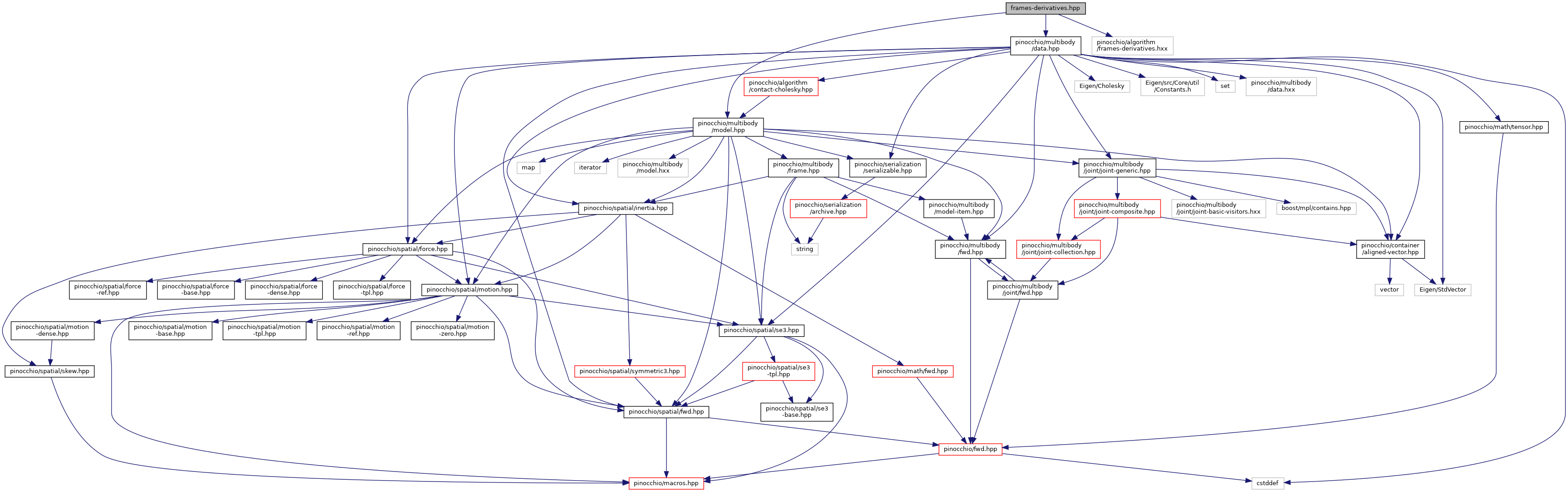
Include dependency graph for frames-derivatives.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6xOut1 , typename Matrix6xOut2 , typename Matrix6xOut3 , typename Matrix6xOut4 > | |
| void | pinocchio::getFrameAccelerationDerivatives (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const FrameIndex frame_id, const ReferenceFrame rf, const Eigen::MatrixBase< Matrix6xOut1 > &v_partial_dq, const Eigen::MatrixBase< Matrix6xOut2 > &a_partial_dq, const Eigen::MatrixBase< Matrix6xOut3 > &a_partial_dv, const Eigen::MatrixBase< Matrix6xOut4 > &a_partial_da) |
| Computes the partial derivatives of the frame acceleration quantity with respect to q, v and a. You must first call pinocchio::computeForwardKinematicsDerivatives to compute all the required quantities. It is important to notice that a direct outcome (for free) of this algo is v_partial_dq and v_partial_dv which is equal to a_partial_da. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6xOut1 , typename Matrix6xOut2 , typename Matrix6xOut3 , typename Matrix6xOut4 , typename Matrix6xOut5 > | |
| void | pinocchio::getFrameAccelerationDerivatives (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const FrameIndex frame_id, const ReferenceFrame rf, const Eigen::MatrixBase< Matrix6xOut1 > &v_partial_dq, const Eigen::MatrixBase< Matrix6xOut2 > &v_partial_dv, const Eigen::MatrixBase< Matrix6xOut3 > &a_partial_dq, const Eigen::MatrixBase< Matrix6xOut4 > &a_partial_dv, const Eigen::MatrixBase< Matrix6xOut5 > &a_partial_da) |
| Computes the partial derivatives of the frame acceleration quantity with respect to q, v and a. You must first call pinocchio::computeForwardKinematicsDerivatives to compute all the required quantities. It is important to notice that a direct outcome (for free) of this algo is v_partial_dq and v_partial_dv which is equal to a_partial_da. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6xOut1 , typename Matrix6xOut2 , typename Matrix6xOut3 , typename Matrix6xOut4 > | |
| void | pinocchio::getFrameAccelerationDerivatives (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex joint_id, const SE3Tpl< Scalar, Options > &placement, const ReferenceFrame rf, const Eigen::MatrixBase< Matrix6xOut1 > &v_partial_dq, const Eigen::MatrixBase< Matrix6xOut2 > &a_partial_dq, const Eigen::MatrixBase< Matrix6xOut3 > &a_partial_dv, const Eigen::MatrixBase< Matrix6xOut4 > &a_partial_da) |
| Computes the partial derivatives of the spatial acceleration of a frame given by its relative placement, with respect to q, v and a. You must first call pinocchio::computeForwardKinematicsDerivatives to compute all the required quantities. It is important to notice that a direct outcome (for free) of this algo is v_partial_dq and v_partial_dv which is equal to a_partial_da. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6xOut1 , typename Matrix6xOut2 , typename Matrix6xOut3 , typename Matrix6xOut4 , typename Matrix6xOut5 > | |
| void | pinocchio::getFrameAccelerationDerivatives (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex joint_id, const SE3Tpl< Scalar, Options > &placement, const ReferenceFrame rf, const Eigen::MatrixBase< Matrix6xOut1 > &v_partial_dq, const Eigen::MatrixBase< Matrix6xOut2 > &v_partial_dv, const Eigen::MatrixBase< Matrix6xOut3 > &a_partial_dq, const Eigen::MatrixBase< Matrix6xOut4 > &a_partial_dv, const Eigen::MatrixBase< Matrix6xOut5 > &a_partial_da) |
| Computes the partial derivatives of the frame acceleration quantity with respect to q, v and a. You must first call pinocchio::computeForwardKinematicsDerivatives to compute all the required quantities. It is important to notice that a direct outcome (for free) of this algo is v_partial_dq and v_partial_dv which is equal to a_partial_da. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6xOut1 , typename Matrix6xOut2 > | |
| void | pinocchio::getFrameVelocityDerivatives (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex joint_id, const SE3Tpl< Scalar, Options > &placement, const ReferenceFrame rf, const Eigen::MatrixBase< Matrix6xOut1 > &v_partial_dq, const Eigen::MatrixBase< Matrix6xOut2 > &v_partial_dv) |
| Computes the partial derivatives of the spatial velocity of a frame given by its relative placement, with respect to q and v. You must first call pinocchio::computeForwardKinematicsDerivatives to compute all the required quantities. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6xOut1 , typename Matrix6xOut2 > | |
| void | pinocchio::getFrameVelocityDerivatives (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const FrameIndex frame_id, const ReferenceFrame rf, const Eigen::MatrixBase< Matrix6xOut1 > &v_partial_dq, const Eigen::MatrixBase< Matrix6xOut2 > &v_partial_dv) |
| Computes the partial derivatives of the frame spatial velocity with respect to q and v. You must first call pinocchio::computeForwardKinematicsDerivatives to compute all the required quantities. More... | |