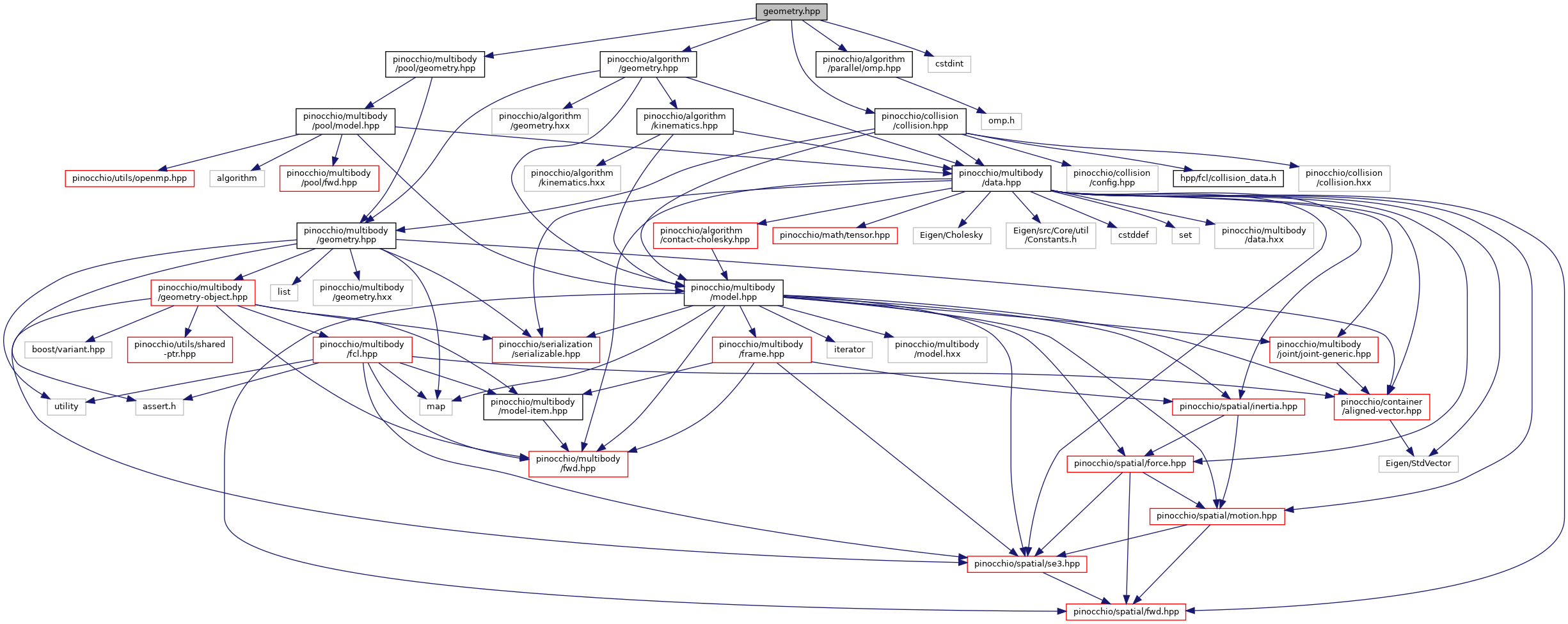
#include "pinocchio/multibody/pool/geometry.hpp"#include "pinocchio/algorithm/geometry.hpp"#include "pinocchio/collision/collision.hpp"#include "pinocchio/algorithm/parallel/omp.hpp"#include <cstdint>
Include dependency graph for collision/parallel/geometry.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| bool | pinocchio::computeCollisionsInParallel (const size_t num_threads, const GeometryModel &geom_model, GeometryData &geom_data, const bool stopAtFirstCollision=false) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| bool | pinocchio::computeCollisionsInParallel (const size_t num_threads, const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const GeometryModel &geom_model, GeometryData &geom_data, const Eigen::MatrixBase< ConfigVectorType > &q, const bool stopAtFirstCollision=false) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorPool , typename CollisionVectorResult > | |
| void | pinocchio::computeCollisionsInParallel (const size_t num_threads, GeometryPoolTpl< Scalar, Options, JointCollectionTpl > &pool, const Eigen::MatrixBase< ConfigVectorPool > &q, const Eigen::MatrixBase< CollisionVectorResult > &res, const bool stopAtFirstCollisionInConfiguration=false, const bool stopAtFirstCollisionInBatch=false) |