#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/geometry.hpp"#include "pinocchio/algorithm/model.hxx"
Include dependency graph for algorithm/model.hpp:
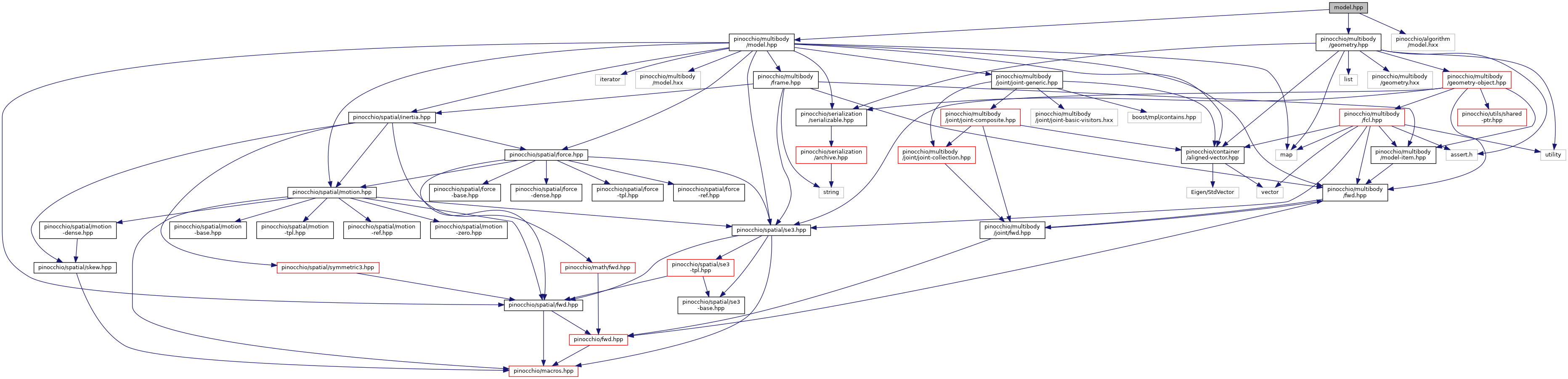
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > | pinocchio::appendModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &modelA, const ModelTpl< Scalar, Options, JointCollectionTpl > &modelB, const FrameIndex frameInModelA, const SE3Tpl< Scalar, Options > &aMb) |
| Append a child model into a parent model, after a specific frame given by its index. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::appendModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &modelA, const ModelTpl< Scalar, Options, JointCollectionTpl > &modelB, const FrameIndex frameInModelA, const SE3Tpl< Scalar, Options > &aMb, ModelTpl< Scalar, Options, JointCollectionTpl > &model) |
| Append a child model into a parent model, after a specific frame given by its index. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::appendModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &modelA, const ModelTpl< Scalar, Options, JointCollectionTpl > &modelB, const GeometryModel &geomModelA, const GeometryModel &geomModelB, const FrameIndex frameInModelA, const SE3Tpl< Scalar, Options > &aMb, ModelTpl< Scalar, Options, JointCollectionTpl > &model, GeometryModel &geomModel) |
| Append a child model into a parent model, after a specific frame given by its index. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::buildMimicModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &input_model, const std::vector< JointIndex > &index_mimicked, const std::vector< JointIndex > &index_mimicking, const std::vector< Scalar > &scaling, const std::vector< Scalar > &offset, ModelTpl< Scalar, Options, JointCollectionTpl > &output_model) |
| Transform joints of a model into mimic joints. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| void | pinocchio::buildReducedModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const GeometryModel &geom_model, const std::vector< JointIndex > &list_of_joints_to_lock, const Eigen::MatrixBase< ConfigVectorType > &reference_configuration, ModelTpl< Scalar, Options, JointCollectionTpl > &reduced_model, GeometryModel &reduced_geom_model) |
| Build a reduced model and a rededuced geometry model from a given input model, a given input geometry model and a list of joint to lock. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename GeometryModelAllocator , typename ConfigVectorType > | |
| void | pinocchio::buildReducedModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const std::vector< GeometryModel, GeometryModelAllocator > &list_of_geom_models, const std::vector< JointIndex > &list_of_joints_to_lock, const Eigen::MatrixBase< ConfigVectorType > &reference_configuration, ModelTpl< Scalar, Options, JointCollectionTpl > &reduced_model, std::vector< GeometryModel, GeometryModelAllocator > &list_of_reduced_geom_models) |
| Build a reduced model and a rededuced geometry model from a given input model, a given input geometry model and a list of joint to lock. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| ModelTpl< Scalar, Options, JointCollectionTpl > | pinocchio::buildReducedModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const std::vector< JointIndex > &list_of_joints_to_lock, const Eigen::MatrixBase< ConfigVectorType > &reference_configuration) |
| Build a reduced model from a given input model and a list of joint to lock. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| void | pinocchio::buildReducedModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, std::vector< JointIndex > list_of_joints_to_lock, const Eigen::MatrixBase< ConfigVectorType > &reference_configuration, ModelTpl< Scalar, Options, JointCollectionTpl > &reduced_model) |
| Build a reduced model from a given input model and a list of joint to lock. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| JointIndex | pinocchio::findCommonAncestor (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, JointIndex joint1_id, JointIndex joint2_id, size_t &index_ancestor_in_support1, size_t &index_ancestor_in_support2) |
| Computes the common ancestor between two joints belonging to the same kinematic tree. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::transformJointIntoMimic (const ModelTpl< Scalar, Options, JointCollectionTpl > &input_model, const JointIndex &index_mimicked, const JointIndex &index_mimicking, const Scalar &scaling, const Scalar &offset, ModelTpl< Scalar, Options, JointCollectionTpl > &output_model) |
| Transform of a joint of the model into a mimic joint. Keep the type of the joint as it was previously. More... | |