planning_components_tools
src
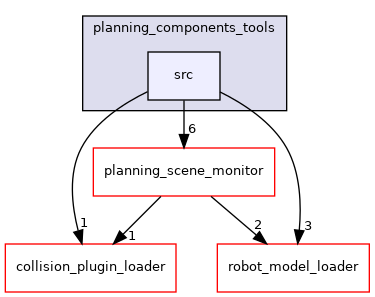
src Directory Reference
Directory dependency graph for src:
Files
file
compare_collision_speed_checking_fcl_bullet.cpp
[code]
file
display_random_state.cpp
[code]
file
evaluate_collision_checking_speed.cpp
[code]
file
evaluate_state_operations_speed.cpp
[code]
file
kinematics_speed_and_validity_evaluator.cpp
[code]
file
print_planning_model_info.cpp
[code]
file
print_planning_scene_info.cpp
[code]
file
publish_scene_from_text.cpp
[code]
file
visualize_robot_collision_volume.cpp
[code]
planning
Author(s): Ioan Sucan
, Sachin Chitta
autogenerated on Sat May 3 2025 02:26:19