#include <moveit/trajectory_processing/iterative_time_parameterization.h>#include <moveit/trajectory_processing/limit_cartesian_speed.h>
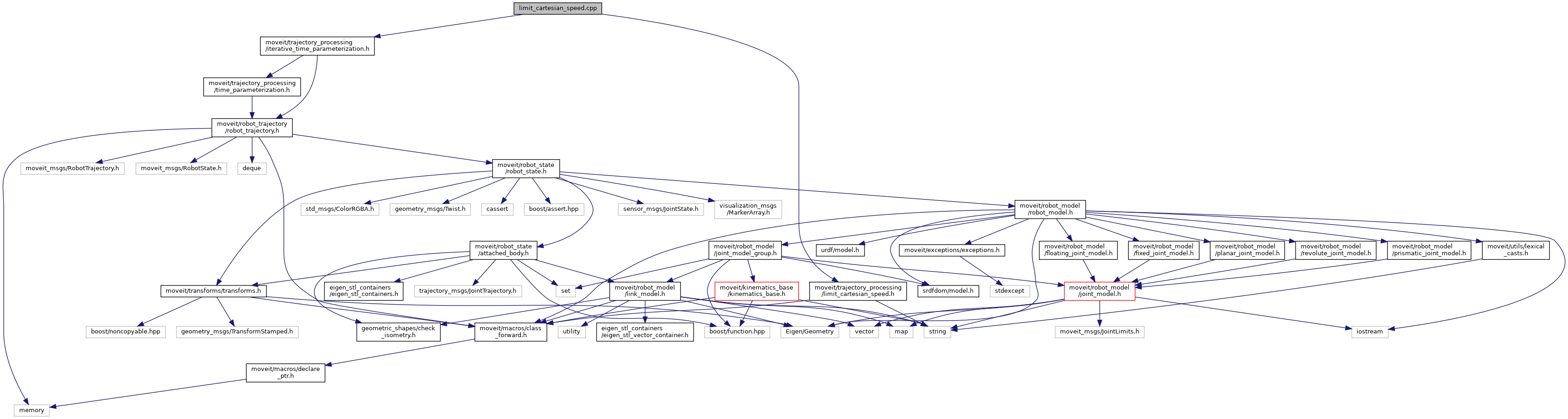
Include dependency graph for limit_cartesian_speed.cpp:
Go to the source code of this file.
Namespaces | |
| trajectory_processing | |
Functions | |
| bool | trajectory_processing::limitMaxCartesianLinkSpeed (robot_trajectory::RobotTrajectory &trajectory, const double speed, const moveit::core::LinkModel *link_model) |
| bool | trajectory_processing::limitMaxCartesianLinkSpeed (robot_trajectory::RobotTrajectory &trajectory, const double speed, const std::string &link_name="") |
Variables | |
| const char * | LOGGER_NAME = "trajectory_processing.cartesian_speed" |
Variable Documentation
◆ LOGGER_NAME
| const char* LOGGER_NAME = "trajectory_processing.cartesian_speed" |
Definition at line 42 of file limit_cartesian_speed.cpp.