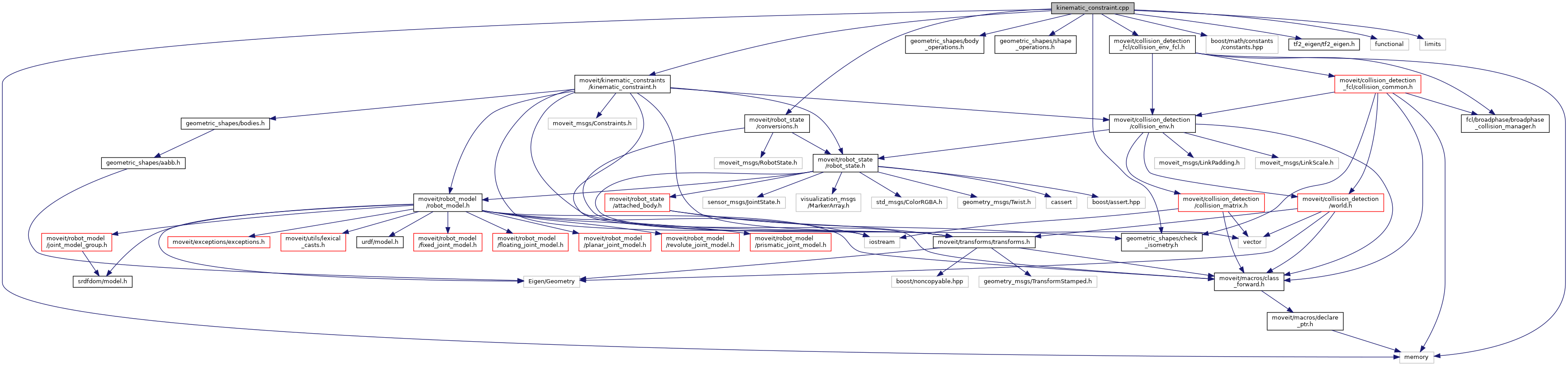
#include <moveit/kinematic_constraints/kinematic_constraint.h>#include <geometric_shapes/body_operations.h>#include <geometric_shapes/shape_operations.h>#include <moveit/robot_state/conversions.h>#include <moveit/collision_detection_fcl/collision_env_fcl.h>#include <geometric_shapes/check_isometry.h>#include <boost/math/constants/constants.hpp>#include <tf2_eigen/tf2_eigen.h>#include <functional>#include <limits>#include <memory>
Include dependency graph for kinematic_constraint.cpp:
Go to the source code of this file.
Namespaces | |
| kinematic_constraints | |
| Representation and evaluation of kinematic constraints. | |
Functions | |
| template<typename Derived > | |
| std::tuple< Eigen::Matrix< typename Eigen::MatrixBase< Derived >::Scalar, 3, 1 >, bool > | kinematic_constraints::CalcEulerAngles (const Eigen::MatrixBase< Derived > &R) |
| static ConstraintEvaluationResult | kinematic_constraints::finishPositionConstraintDecision (const Eigen::Vector3d &pt, const Eigen::Vector3d &desired, const std::string &name, double weight, bool result, bool verbose) |
| static double | kinematic_constraints::normalizeAbsoluteAngle (const double angle) |
| static double | kinematic_constraints::normalizeAngle (double angle) |