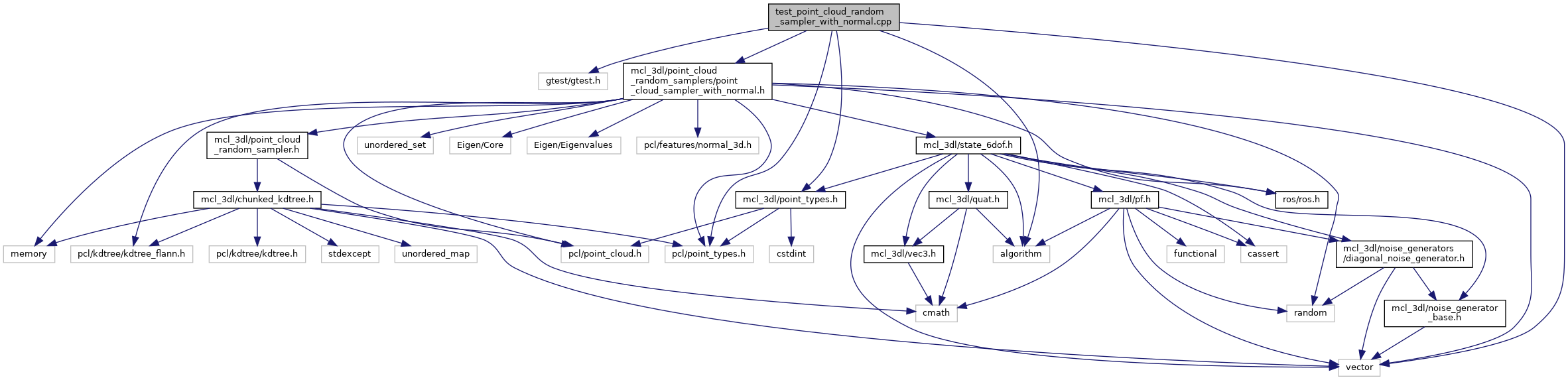
#include <gtest/gtest.h>#include <algorithm>#include <vector>#include <pcl/point_types.h>#include <mcl_3dl/point_cloud_random_samplers/point_cloud_sampler_with_normal.h>#include <mcl_3dl/point_types.h>
Include dependency graph for test_point_cloud_random_sampler_with_normal.cpp:
Go to the source code of this file.
Namespaces | |
| mcl_3dl | |
| mcl_3dl::test | |
Functions | |
| std::vector< State6DOF > | mcl_3dl::test::buildPoseCovarianceMatrix (const double yaw, const double front_std_dev, const double side_std_dev) |
| void | mcl_3dl::test::buildWall (pcl::PointCloud< PointXYZIL >::Ptr result_points, double rotation_angle, int wall_length) |
| int | main (int argc, char **argv) |
| mcl_3dl::test::TEST (PointCloudSamplerWithNormal, Sampling) | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 177 of file test_point_cloud_random_sampler_with_normal.cpp.