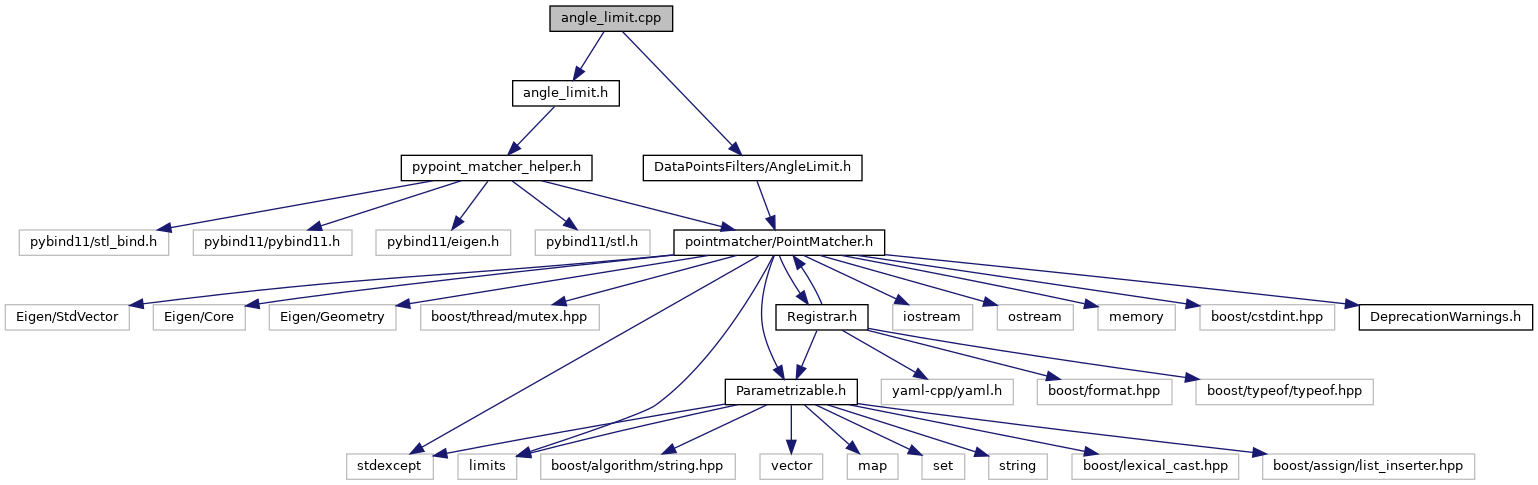
Include dependency graph for angle_limit.cpp:
Go to the source code of this file.
Namespaces | |
| python | |
| python::datapointsfilters | |
Functions | |
| void | python::datapointsfilters::pybindAngleLimit (py::module &p_module) |
Go to the source code of this file.
Namespaces | |
| python | |
| python::datapointsfilters | |
Functions | |
| void | python::datapointsfilters::pybindAngleLimit (py::module &p_module) |