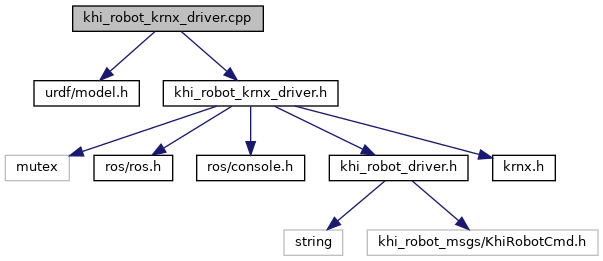
Include dependency graph for khi_robot_krnx_driver.cpp:
Go to the source code of this file.
Namespaces | |
| khi_robot_control | |
Macros | |
| #define | KHI_KRNX_ACTIVATE_TH 0.02 |
| #define | KHI_KRNX_BUFFER_SIZE 4 |
| #define | KHI_KRNX_M2MM 1000 |
| #define | KHI_ROBOT_RS007L "RS007L" |
| #define | KHI_ROBOT_RS007N "RS007N" |
| #define | KHI_ROBOT_RS013N "RS013N" |
| #define | KHI_ROBOT_RS080N "RS080N" |
| #define | KHI_ROBOT_WD002N "WD002N" |
Macro Definition Documentation
◆ KHI_KRNX_ACTIVATE_TH
| #define KHI_KRNX_ACTIVATE_TH 0.02 |
Definition at line 78 of file khi_robot_krnx_driver.cpp.
◆ KHI_KRNX_BUFFER_SIZE
| #define KHI_KRNX_BUFFER_SIZE 4 |
Definition at line 77 of file khi_robot_krnx_driver.cpp.
◆ KHI_KRNX_M2MM
| #define KHI_KRNX_M2MM 1000 |
Definition at line 79 of file khi_robot_krnx_driver.cpp.
◆ KHI_ROBOT_RS007L
| #define KHI_ROBOT_RS007L "RS007L" |
Definition at line 73 of file khi_robot_krnx_driver.cpp.
◆ KHI_ROBOT_RS007N
| #define KHI_ROBOT_RS007N "RS007N" |
Definition at line 74 of file khi_robot_krnx_driver.cpp.
◆ KHI_ROBOT_RS013N
| #define KHI_ROBOT_RS013N "RS013N" |
Definition at line 75 of file khi_robot_krnx_driver.cpp.
◆ KHI_ROBOT_RS080N
| #define KHI_ROBOT_RS080N "RS080N" |
Definition at line 76 of file khi_robot_krnx_driver.cpp.
◆ KHI_ROBOT_WD002N
| #define KHI_ROBOT_WD002N "WD002N" |
Definition at line 72 of file khi_robot_krnx_driver.cpp.