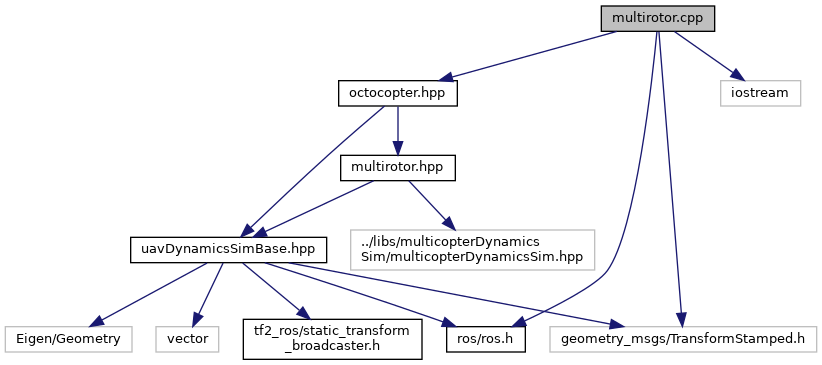
#include "octocopter.hpp"#include <iostream>#include <ros/ros.h>#include <geometry_msgs/TransformStamped.h>
Include dependency graph for multirotor.cpp:
Go to the source code of this file.
Functions | |
| template<class T > | |
| static void | getParameter (const std::string &name, T ¶meter, T default_value, std::string unit="") |
Variables | |
| static const std::string | MULTICOPTER_PARAMS_NS = "/uav/aerodynamics_coeffs/" |
Function Documentation
◆ getParameter()
template<class T >
|
static |
Definition at line 29 of file multirotor.cpp.
Variable Documentation
◆ MULTICOPTER_PARAMS_NS
|
static |
Definition at line 27 of file multirotor.cpp.