#include <ign_ros_control_plugin.hpp>
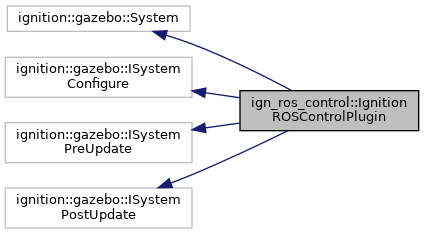
Inheritance diagram for ign_ros_control::IgnitionROSControlPlugin:
Public Member Functions | |
| void | Configure (const ignition::gazebo::Entity &_entity, const std::shared_ptr< const sdf::Element > &_sdf, ignition::gazebo::EntityComponentManager &_ecm, ignition::gazebo::EventManager &_eventMgr) override |
| IgnitionROSControlPlugin () | |
| Constructor. More... | |
| void | PostUpdate (const ignition::gazebo::UpdateInfo &_info, const ignition::gazebo::EntityComponentManager &_ecm) override |
| void | PreUpdate (const ignition::gazebo::UpdateInfo &_info, ignition::gazebo::EntityComponentManager &_ecm) override |
| ~IgnitionROSControlPlugin () override | |
| Destructor. More... | |
Private Attributes | |
| std::unique_ptr< IgnitionROSControlPluginPrivate > | dataPtr |
| Private data pointer. More... | |
Detailed Description
Definition at line 27 of file ign_ros_control_plugin.hpp.
Constructor & Destructor Documentation
◆ IgnitionROSControlPlugin()
| ign_ros_control::IgnitionROSControlPlugin::IgnitionROSControlPlugin | ( | ) |
Constructor.
Definition at line 220 of file ign_ros_control_plugin.cpp.
◆ ~IgnitionROSControlPlugin()
|
override |
Destructor.
Definition at line 226 of file ign_ros_control_plugin.cpp.
Member Function Documentation
◆ Configure()
|
override |
Definition at line 231 of file ign_ros_control_plugin.cpp.
◆ PostUpdate()
|
override |
Definition at line 388 of file ign_ros_control_plugin.cpp.
◆ PreUpdate()
|
override |
Definition at line 358 of file ign_ros_control_plugin.cpp.
Member Data Documentation
◆ dataPtr
|
private |
Private data pointer.
Definition at line 60 of file ign_ros_control_plugin.hpp.
The documentation for this class was generated from the following files: