#include <boost/math/constants/constants.hpp>#include <hpp/fcl/collision_object.h>#include <hpp/fcl/data_types.h>#include <string.h>
Include dependency graph for shape/geometric_shapes.h:
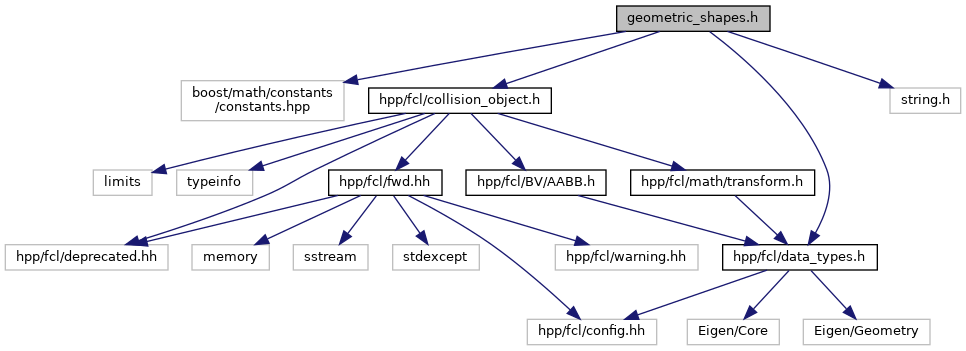
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | hpp::fcl::Box |
| Center at zero point, axis aligned box. More... | |
| class | hpp::fcl::Capsule |
Capsule It is  where where  is the distance between the point x and the capsule segment AB, with is the distance between the point x and the capsule segment AB, with  . More... . More... | |
| class | hpp::fcl::Cone |
Cone The base of the cone is at  and the top is at and the top is at  . More... . More... | |
| class | hpp::fcl::Convex< PolygonT > |
| Convex polytope. More... | |
| class | hpp::fcl::ConvexBase |
| Base for convex polytope. More... | |
| class | hpp::fcl::Cylinder |
| Cylinder along Z axis. The cylinder is defined at its centroid. More... | |
| class | hpp::fcl::Ellipsoid |
| Ellipsoid centered at point zero. More... | |
| class | hpp::fcl::Halfspace |
| Half Space: this is equivalent to the Plane in ODE. The separation plane is defined as n * x = d; Points in the negative side of the separation plane (i.e. {x | n * x < d}) are inside the half space and points in the positive side of the separation plane (i.e. {x | n * x > d}) are outside the half space. More... | |
| struct | hpp::fcl::ConvexBase::Neighbors |
| class | hpp::fcl::Plane |
| Infinite plane. More... | |
| class | hpp::fcl::ShapeBase |
| Base class for all basic geometric shapes. More... | |
| class | hpp::fcl::Sphere |
| Center at zero point sphere. More... | |
| class | hpp::fcl::TriangleP |
| Triangle stores the points instead of only indices of points. More... | |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |