3D Point More...
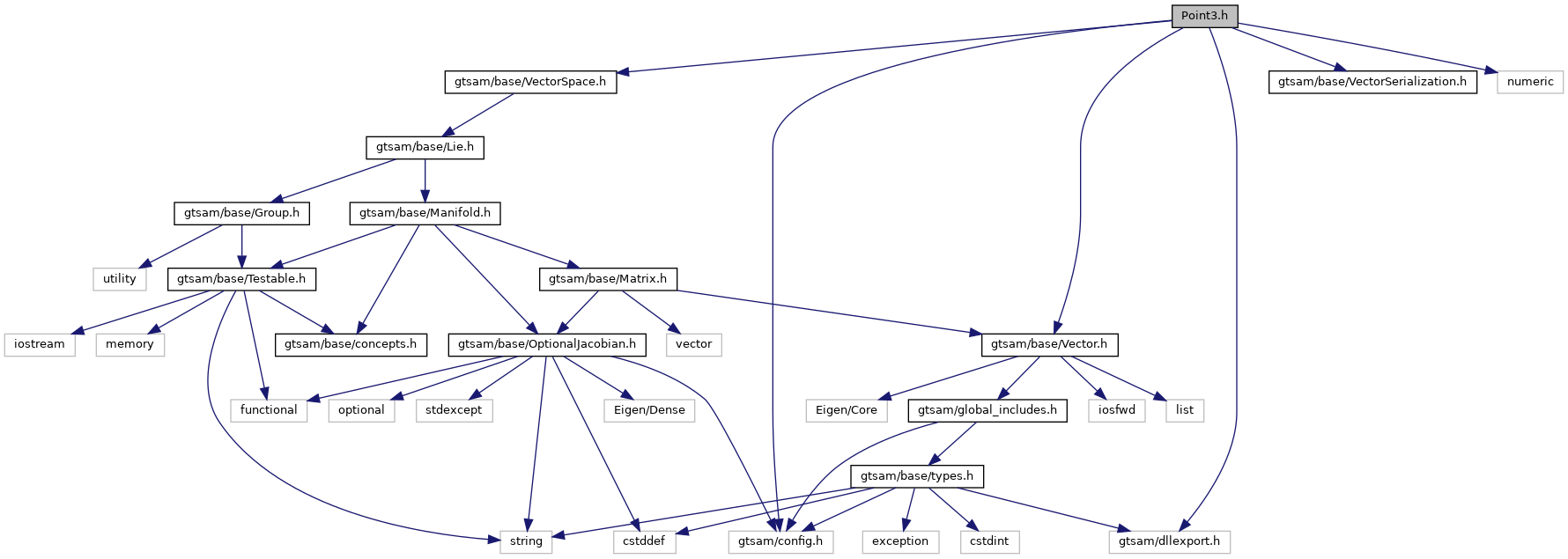
#include <gtsam/config.h>#include <gtsam/base/VectorSpace.h>#include <gtsam/base/Vector.h>#include <gtsam/dllexport.h>#include <gtsam/base/VectorSerialization.h>#include <numeric>
Include dependency graph for Point3.h:
Go to the source code of this file.
Classes | |
| struct | gtsam::Range< A1, A2 > |
| struct | gtsam::Range< Point3, Point3 > |
Namespaces | |
| gtsam | |
| traits | |
Typedefs | |
| typedef Vector3 | gtsam::Point3 |
| using | gtsam::Point3Pair = std::pair< Point3, Point3 > |
| using | gtsam::Point3Pairs = list |
| typedef std::vector< Point3, Eigen::aligned_allocator< Point3 > > | gtsam::Point3Vector |
Functions | |
| Point3 | gtsam::cross (const Point3 &p, const Point3 &q, OptionalJacobian< 3, 3 > H_p={}, OptionalJacobian< 3, 3 > H_q={}) |
| cross product More... | |
| double | gtsam::distance3 (const Point3 &p1, const Point3 &q, OptionalJacobian< 1, 3 > H1={}, OptionalJacobian< 1, 3 > H2={}) |
| distance between two points More... | |
| double | gtsam::dot (const Point3 &p, const Point3 &q, OptionalJacobian< 1, 3 > H_p={}, OptionalJacobian< 1, 3 > H_q={}) |
| dot product More... | |
| Point3 | gtsam::doubleCross (const Point3 &p, const Point3 &q, OptionalJacobian< 3, 3 > H1={}, OptionalJacobian< 3, 3 > H2={}) |
| double cross product More... | |
| template<class CONTAINER > | |
| Point3 | gtsam::mean (const CONTAINER &points) |
| mean More... | |
| Point3Pair | gtsam::means (const std::vector< Point3Pair > &abPointPairs) |
| Calculate the two means of a set of Point3 pairs. More... | |
| double | gtsam::norm3 (const Point3 &p, OptionalJacobian< 1, 3 > H={}) |
| Distance of the point from the origin, with Jacobian. More... | |
| Point3 | gtsam::normalize (const Point3 &p, OptionalJacobian< 3, 3 > H={}) |
| normalize, with optional Jacobian More... | |
| GTSAM_EXPORT std::ostream & | gtsam::operator<< (std::ostream &os, const gtsam::Point3Pair &p) |
Detailed Description
3D Point
Definition in file Point3.h.