Navigation state composing of attitude, position, and velocity. More...
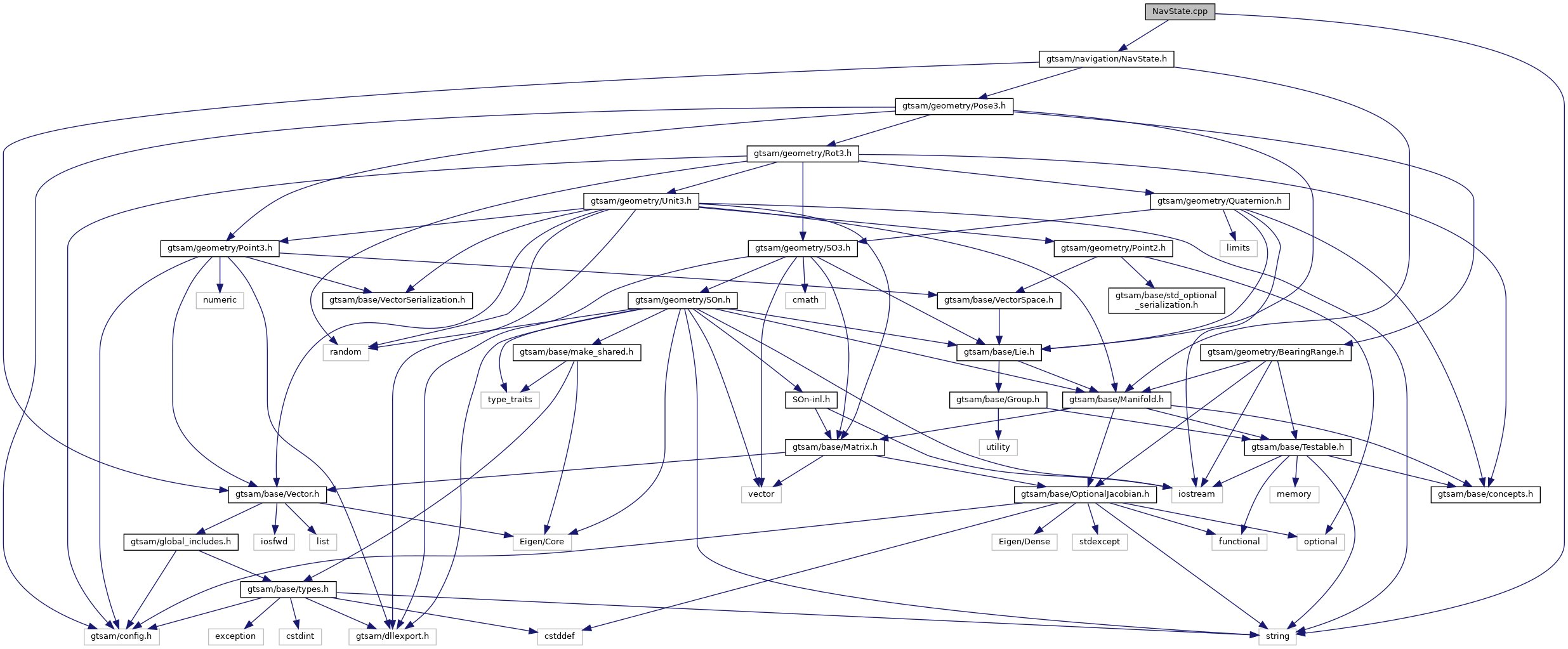
Include dependency graph for NavState.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Macros | |
| #define | D_R_R(H) (H)->block<3,3>(0,0) |
| #define | D_R_t(H) (H)->block<3,3>(0,3) |
| #define | D_R_v(H) (H)->block<3,3>(0,6) |
| #define | D_t_R(H) (H)->block<3,3>(3,0) |
| #define | D_t_t(H) (H)->block<3,3>(3,3) |
| #define | D_t_v(H) (H)->block<3,3>(3,6) |
| #define | D_v_R(H) (H)->block<3,3>(6,0) |
| #define | D_v_t(H) (H)->block<3,3>(6,3) |
| #define | D_v_v(H) (H)->block<3,3>(6,6) |
Functions | |
| std::ostream & | gtsam::operator<< (std::ostream &os, const NavState &state) |
Detailed Description
Navigation state composing of attitude, position, and velocity.
- Date
- July 2015
Definition in file NavState.cpp.
Macro Definition Documentation
◆ D_R_R
Definition at line 365 of file NavState.cpp.
◆ D_R_t
Definition at line 366 of file NavState.cpp.
◆ D_R_v
Definition at line 367 of file NavState.cpp.
◆ D_t_R
Definition at line 368 of file NavState.cpp.
◆ D_t_t
Definition at line 369 of file NavState.cpp.
◆ D_t_v
Definition at line 370 of file NavState.cpp.
◆ D_v_R
Definition at line 371 of file NavState.cpp.
◆ D_v_t
Definition at line 372 of file NavState.cpp.
◆ D_v_v
Definition at line 373 of file NavState.cpp.