Inverse Depth Factor based on Civera09tro, Montiel06rss. Landmarks are parameterized as (theta,phi,rho). The factor involves two poses and a landmark. The first pose is the reference frame from which (theta, phi, rho) is measured. More...
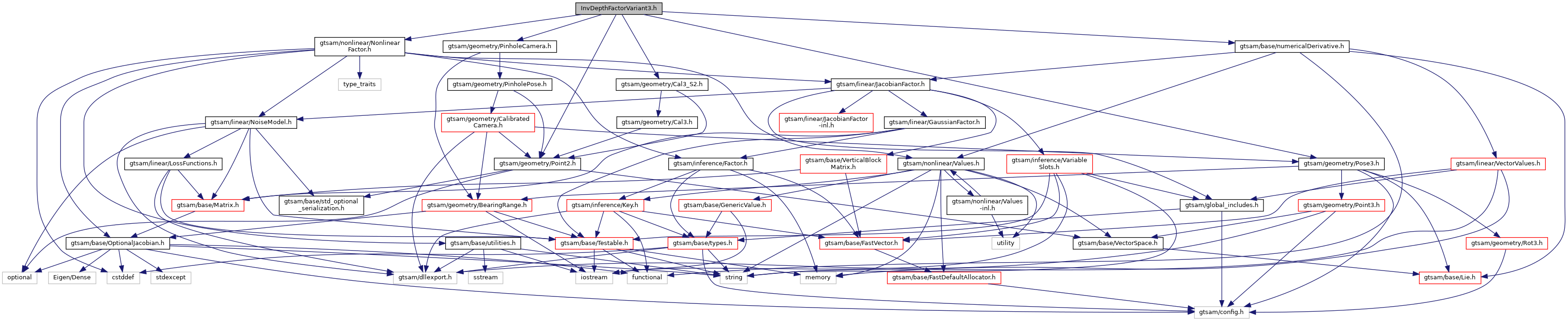
#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/geometry/Cal3_S2.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Point2.h>#include <gtsam/base/numericalDerivative.h>
Include dependency graph for InvDepthFactorVariant3.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::InvDepthFactorVariant3a |
| class | gtsam::InvDepthFactorVariant3b |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
Inverse Depth Factor based on Civera09tro, Montiel06rss. Landmarks are parameterized as (theta,phi,rho). The factor involves two poses and a landmark. The first pose is the reference frame from which (theta, phi, rho) is measured.
Definition in file InvDepthFactorVariant3.h.