Inverse Depth Factor based on Civera09tro, Montiel06rss. Landmarks are initialized from the first camera observation with (x,y,z,theta,phi,inv_depth), where x,y,z are the coordinates of the camera. InvDepthCamera provides methods to initialize inverse depth landmarks (backproject), and to convert inverse depth landmarks to cartesian coordinates (Point3) for visualization, etc. The inverse depth parameterization is split into (x,y,z,theta,phi), (inv_depth) to make it easy to add a prior on inverse depth alone. More...
#include <gtsam/geometry/Cal3_S2.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam_unstable/geometry/InvDepthCamera3.h>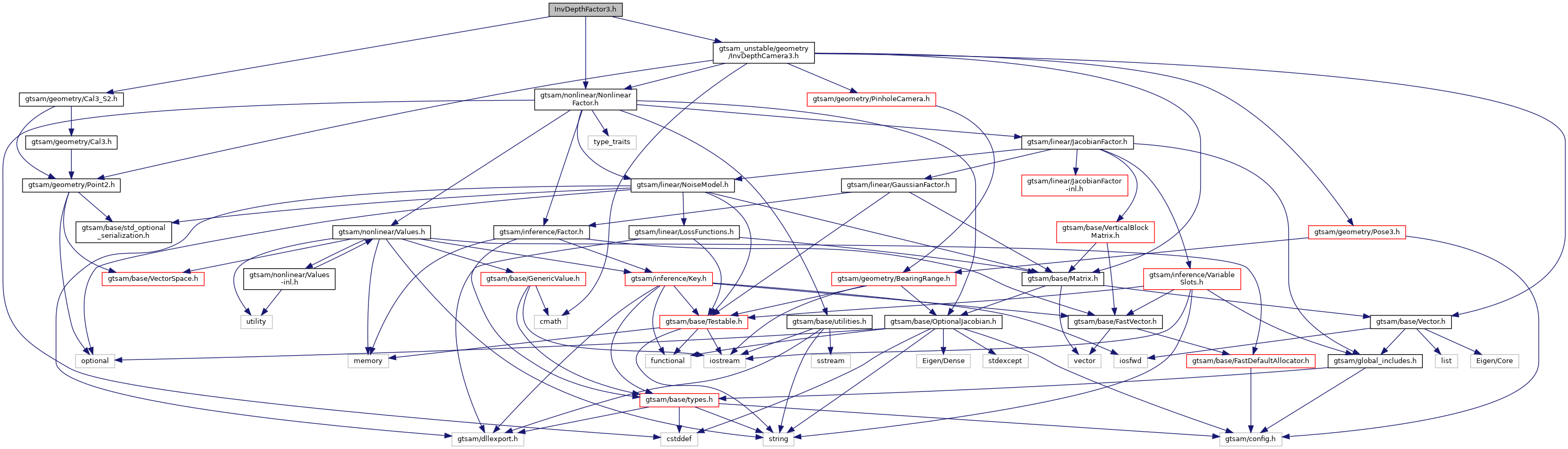
Go to the source code of this file.
Classes | |
| class | gtsam::InvDepthFactor3< POSE, LANDMARK, INVDEPTH > |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
Inverse Depth Factor based on Civera09tro, Montiel06rss. Landmarks are initialized from the first camera observation with (x,y,z,theta,phi,inv_depth), where x,y,z are the coordinates of the camera. InvDepthCamera provides methods to initialize inverse depth landmarks (backproject), and to convert inverse depth landmarks to cartesian coordinates (Point3) for visualization, etc. The inverse depth parameterization is split into (x,y,z,theta,phi), (inv_depth) to make it easy to add a prior on inverse depth alone.
Definition in file InvDepthFactor3.h.