Identifies connected components in the keypoint matches graph. More...
#include <gtsam/sfm/DsfTrackGenerator.h>#include <algorithm>#include <iostream>#include <iomanip>
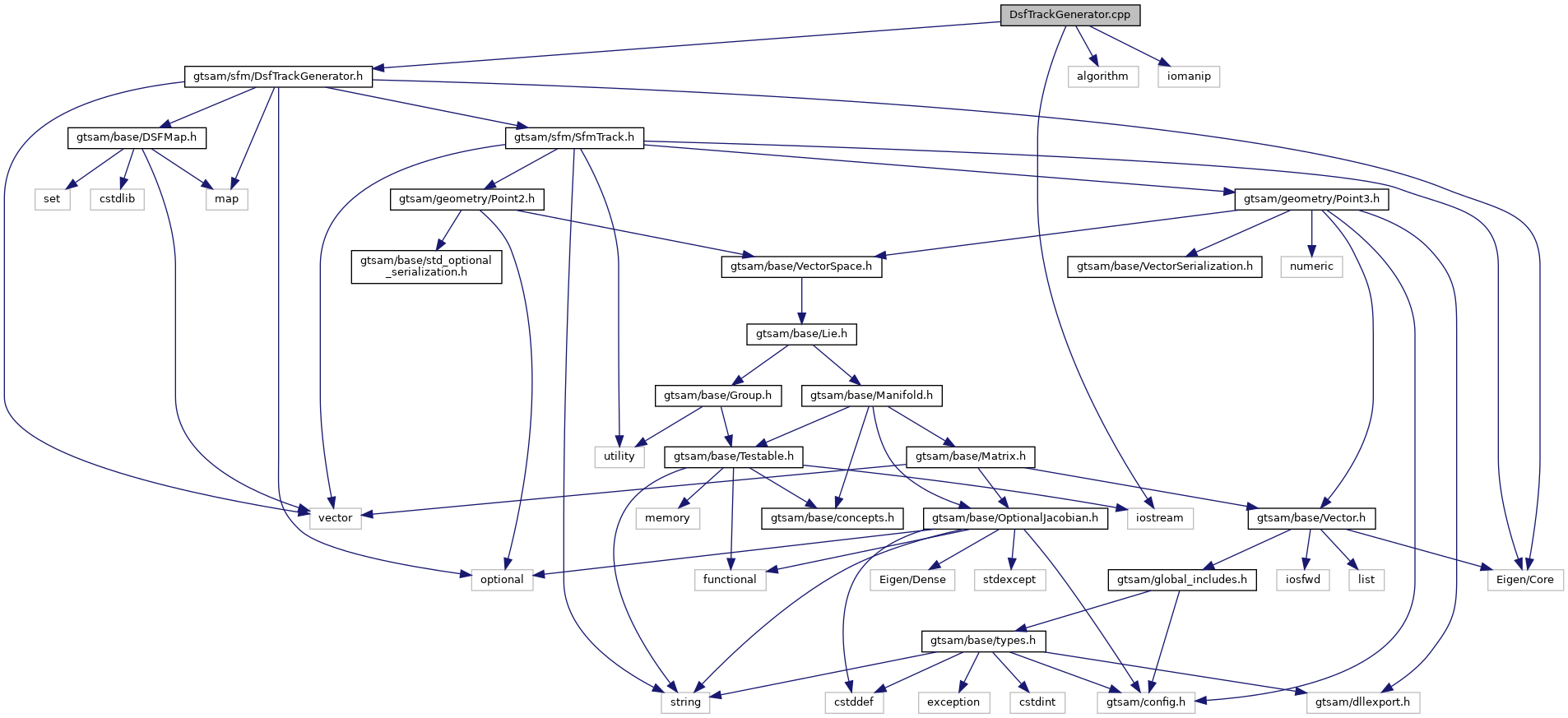
Include dependency graph for DsfTrackGenerator.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
| gtsam::gtsfm | |
Typedefs | |
| typedef DSFMap< IndexPair > | gtsam::gtsfm::DSFMapIndexPair |
Functions | |
| static DSFMapIndexPair | gtsam::gtsfm::generateDSF (const MatchIndicesMap &matches) |
| Generate the DSF to form tracks. More... | |
| static SfmTrack2d | gtsam::gtsfm::trackFromIndexPairs (const std::set< IndexPair > &index_pair_set, const KeypointsVector &keypoints) |
| Generate a single track from a set of index pairs. More... | |
| static std::vector< SfmTrack2d > | gtsam::gtsfm::tracksFromDSF (const DSFMapIndexPair &dsf, const KeypointsVector &keypoints) |
| Generate tracks from the DSF. More... | |
| std::vector< SfmTrack2d > | gtsam::gtsfm::tracksFromPairwiseMatches (const MatchIndicesMap &matches, const KeypointsVector &keypoints, bool verbose) |
| Creates a list of tracks from 2d point correspondences. More... | |
Detailed Description
Identifies connected components in the keypoint matches graph.
- Date
- October 2022
Definition in file DsfTrackGenerator.cpp.