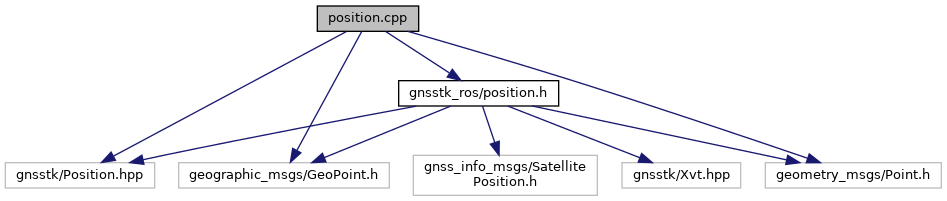
#include <gnsstk/Position.hpp>#include <geographic_msgs/GeoPoint.h>#include <geometry_msgs/Point.h>#include <gnsstk_ros/position.h>
Include dependency graph for position.cpp:
Go to the source code of this file.
Namespaces | |
| gnsstk_ros | |
Functions | |
| gnsstk::Position | gnsstk_ros::convert (const geographic_msgs::GeoPoint &position) |
| Convert the ROS GeoPoint message to gnsstk Position with Geodetic type. More... | |
| gnsstk::Position | gnsstk_ros::convert (const geometry_msgs::Point &position) |
| Convert the ROS Point ECEF position to gnsstk Position with Cartesian type. More... | |
| gnss_info_msgs::SatellitePosition | gnsstk_ros::convert (const gnsstk::Xvt &xvt, uint32_t satcatId, double posCov, double velCov) |
| Convert the given position and velocity to ROS SatellitePosition message. More... | |
| geometry_msgs::Point | gnsstk_ros::convertToCartesianMsg (const gnsstk::Position &position) |
| Convert the given gnsstk Position object to ECEF ROS Point message. More... | |
| geographic_msgs::GeoPoint | gnsstk_ros::convertToGeographicMsg (const gnsstk::Position &position) |
| Convert the given gnsstk Position object to WGS84 ROS GeoPoint message. More... | |