#include <map>#include <string>#include <vector>#include <ros/ros.h>#include <gazebo/common/CommonIface.hh>#include <gazebo/common/Events.hh>#include <gazebo/physics/Link.hh>#include <gazebo/rendering/Camera.hh>#include <gazebo/rendering/Scene.hh>#include <gazebo/sensors/Sensor.hh>#include <gazebo/util/system.hh>#include <gazebo_video_monitor_msgs/SetCamera.h>#include <gazebo_video_monitor_plugins/internal/types.h>
Include dependency graph for gvm_multicamera_sensor.h:

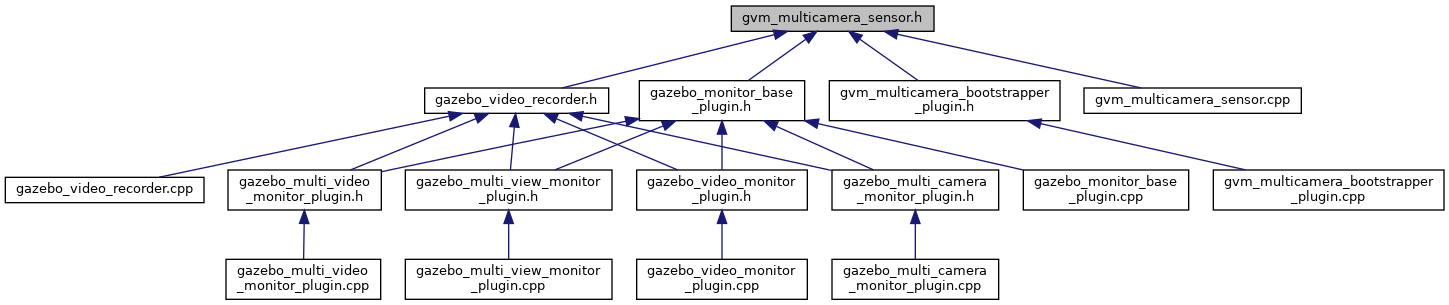
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | gazebo::sensors::GvmMulticameraSensor::CameraData |
| class | gazebo::sensors::GvmMulticameraSensor |
| Creates multiple cameras and publishes an event with synchronized images from all of these cameras. More... | |
| struct | gazebo::sensors::GvmMulticameraSensor::ImageData |
Namespaces | |
| gazebo | |
| gazebo::sensors | |
Typedefs | |
| using | gazebo::sensors::GvmMulticameraSensorPtr = std::shared_ptr< GvmMulticameraSensor > |