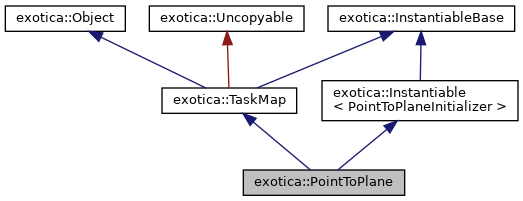
PointToPlane TaskMap: Penalises the z-distance between two frames - or the distance of a point (represented by the Link frame) spanned by the normal represented through the z-axis of a second frame (represented by the Base frame). More...
#include <point_to_plane.h>
Private Member Functions | |
| void | PublishDebug () |
Private Attributes | |
| ros::Publisher | debug_pub_ |
Additional Inherited Members | |
 Public Attributes inherited from exotica::TaskMap Public Attributes inherited from exotica::TaskMap | |
| int | id |
| bool | is_used |
| std::vector< KinematicSolution > | kinematics |
| int | length |
| int | length_jacobian |
| int | start |
| int | start_jacobian |
| Public Attributes inherited from exotica::Object | |
| bool | debug_ |
| std::string | ns_ |
| std::string | object_name_ |
| Protected Attributes inherited from exotica::TaskMap | |
| std::vector< KinematicFrameRequest > | frames_ |
| ScenePtr | scene_ |
| Protected Attributes inherited from exotica::Instantiable< PointToPlaneInitializer > | |
| C | parameters_ |
Detailed Description
PointToPlane TaskMap: Penalises the z-distance between two frames - or the distance of a point (represented by the Link frame) spanned by the normal represented through the z-axis of a second frame (represented by the Base frame).
This TaskMap returns the signed distance to the plane by default. In an unconstrained optimisation this would correspond to an equality constraint and force the distance to the plane to be minimised. In order to use the TaskMap as an inequality constraint, the parameter 'PositiveOnly' can be set to true. In this case, the TaskMap applies a ReLU-like activation ($x = \max(0, x)$) to the output.
Definition at line 47 of file point_to_plane.h.
Member Function Documentation
◆ Instantiate()
|
override |
Definition at line 39 of file point_to_plane.cpp.
◆ PublishDebug()
|
private |
Definition at line 143 of file point_to_plane.cpp.
◆ TaskSpaceDim()
|
overridevirtual |
Implements exotica::TaskMap.
Definition at line 138 of file point_to_plane.cpp.
◆ Update() [1/3]
|
overridevirtual |
Implements exotica::TaskMap.
Definition at line 57 of file point_to_plane.cpp.
◆ Update() [2/3]
|
overridevirtual |
Reimplemented from exotica::TaskMap.
Definition at line 76 of file point_to_plane.cpp.
◆ Update() [3/3]
|
overridevirtual |
Reimplemented from exotica::TaskMap.
Definition at line 113 of file point_to_plane.cpp.
Member Data Documentation
◆ debug_pub_
|
private |
Definition at line 59 of file point_to_plane.h.
The documentation for this class was generated from the following files: