#include <continuous_joint_pose.h>
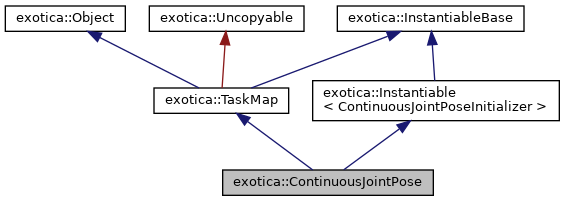
Inheritance diagram for exotica::ContinuousJointPose:
Public Attributes | |
| std::vector< int > | joint_map_ |
| int | N_ |
 Public Attributes inherited from exotica::TaskMap Public Attributes inherited from exotica::TaskMap | |
| int | id |
| bool | is_used |
| std::vector< KinematicSolution > | kinematics |
| int | length |
| int | length_jacobian |
| int | start |
| int | start_jacobian |
| Public Attributes inherited from exotica::Object | |
| bool | debug_ |
| std::string | ns_ |
| std::string | object_name_ |
Private Member Functions | |
| void | Initialize () |
Additional Inherited Members | |
| Protected Attributes inherited from exotica::TaskMap | |
| std::vector< KinematicFrameRequest > | frames_ |
| ScenePtr | scene_ |
| Protected Attributes inherited from exotica::Instantiable< ContinuousJointPoseInitializer > | |
| C | parameters_ |
Detailed Description
Definition at line 39 of file continuous_joint_pose.h.
Member Function Documentation
◆ AssignScene()
|
overridevirtual |
Reimplemented from exotica::TaskMap.
Definition at line 83 of file continuous_joint_pose.cpp.
◆ Initialize()
|
private |
Definition at line 89 of file continuous_joint_pose.cpp.
◆ TaskSpaceDim()
|
overridevirtual |
Implements exotica::TaskMap.
Definition at line 114 of file continuous_joint_pose.cpp.
◆ Update() [1/3]
|
overridevirtual |
Implements exotica::TaskMap.
Definition at line 36 of file continuous_joint_pose.cpp.
◆ Update() [2/3]
|
overridevirtual |
Reimplemented from exotica::TaskMap.
Definition at line 46 of file continuous_joint_pose.cpp.
◆ Update() [3/3]
|
overridevirtual |
Reimplemented from exotica::TaskMap.
Definition at line 62 of file continuous_joint_pose.cpp.
Member Data Documentation
◆ joint_map_
| std::vector<int> exotica::ContinuousJointPose::joint_map_ |
Definition at line 49 of file continuous_joint_pose.h.
◆ N_
| int exotica::ContinuousJointPose::N_ |
Definition at line 50 of file continuous_joint_pose.h.
The documentation for this class was generated from the following files: