Common setter functions for the ETSI ITS Common Data Dictionary (CDD) v1.3.1 and v2.1.1. More...
#include <etsi_its_msgs_utils/impl/checks.h>#include <etsi_its_msgs_utils/impl/constants.h>#include <GeographicLib/UTMUPS.hpp>#include <array>#include <cmath>#include <cstdint>#include <cstring>#include <type_traits>
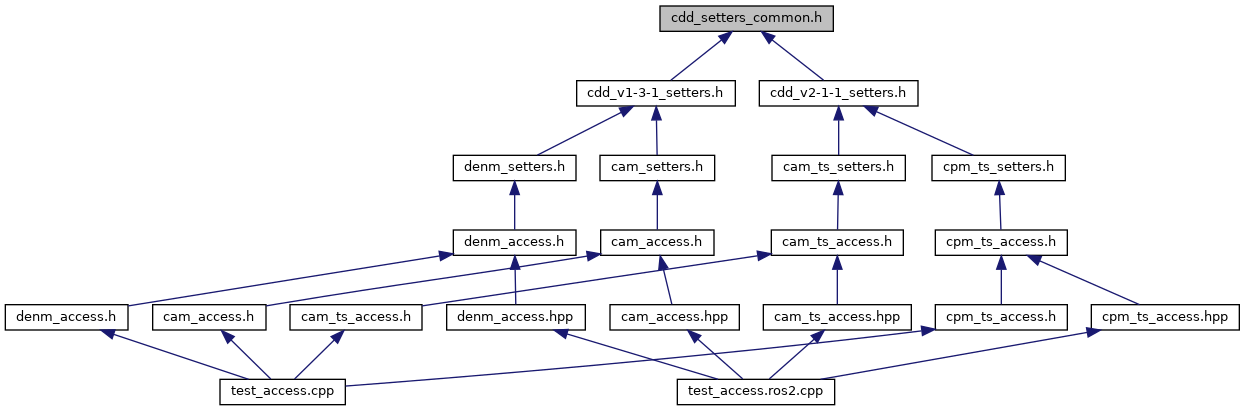
Go to the source code of this file.
Functions | |
| std::tuple< double, double, double > | confidenceEllipseFromCovMatrix (const std::array< double, 4 > &covariance_matrix, const double object_heading) |
| Gets the values needed to set a confidence ellipse from a covariance matrix. More... | |
| std::tuple< double, double, double > | confidenceEllipseFromWGSCovMatrix (const std::array< double, 4 > &covariance_matrix) |
| Gets the values needed to set a confidence ellipse from a covariance matrix. More... | |
| template<typename AccelerationConfidence > | |
| void | setAccelerationConfidence (AccelerationConfidence &accel_confidence, const double value) |
| Set the Acceleration Confidence object. More... | |
| void | setAltitude (Altitude &altitude, const double value) |
| Set the Altitude object. More... | |
| void | setAltitudeValue (AltitudeValue &altitude, const double value) |
| Set the AltitudeValue object. More... | |
| template<typename T > | |
| void | setFromUTMPosition (T &reference_position, const gm::PointStamped &utm_position, const int zone, const bool northp) |
| Set the ReferencePosition from a given UTM-Position. More... | |
| template<typename Heading , typename HeadingConfidence = decltype(Heading::heading_confidence)> | |
| void | setHeadingCDD (Heading &heading, const double value, double confidence=std::numeric_limits< double >::infinity()) |
| Set the Heading object. More... | |
| template<typename HeadingConfidence > | |
| void | setHeadingConfidence (HeadingConfidence &heading_confidence, const double value) |
| Set the Heading Confidence object. More... | |
| template<typename HeadingValue > | |
| void | setHeadingValue (HeadingValue &heading, const double value) |
| Set the HeadingValue object. More... | |
| void | setLatitude (Latitude &latitude, const double deg) |
| Set the Latitude object. More... | |
| void | setLongitude (Longitude &longitude, const double deg) |
| Set the Longitude object. More... | |
| template<typename PosConfidenceEllipse > | |
| void | setPosConfidenceEllipse (PosConfidenceEllipse &position_confidence_ellipse, const double semi_major_axis, const double semi_minor_axis, const double orientation) |
| Set the Pos Confidence Ellipse object. More... | |
| template<typename PosConfidenceEllipse > | |
| void | setPosConfidenceEllipse (PosConfidenceEllipse &position_confidence_ellipse, const std::array< double, 4 > &covariance_matrix, const double object_heading) |
| Set the Pos Confidence Ellipse object. More... | |
| template<typename T > | |
| void | setReferencePosition (T &ref_position, const double latitude, const double longitude, const double altitude=AltitudeValue::UNAVAILABLE) |
| Sets the reference position in the given ReferencePostion object. More... | |
| template<typename SemiAxisLength > | |
| void | setSemiAxis (SemiAxisLength &semi_axis_length, const double length) |
| Set the Semi Axis length. More... | |
| void | setSpeed (Speed &speed, const double value, const double confidence=std::numeric_limits< double >::infinity()) |
| Set the Speed object. More... | |
| void | setSpeedConfidence (SpeedConfidence &speed_confidence, const double value) |
| Set the Speed Confidence object. More... | |
| void | setSpeedValue (SpeedValue &speed, const double value) |
| Set the SpeedValue object. More... | |
| void | setTimestampITS (TimestampIts ×tamp_its, const uint64_t unix_nanosecs, const uint16_t n_leap_seconds=etsi_its_msgs::LEAP_SECOND_INSERTIONS_SINCE_2004.rbegin() ->second) |
| Set the TimestampITS object. More... | |
| template<typename PosConfidenceEllipse > | |
| void | setWGSPosConfidenceEllipse (PosConfidenceEllipse &position_confidence_ellipse, const std::array< double, 4 > &covariance_matrix) |
| Set the Pos Confidence Ellipse object. More... | |
Detailed Description
Common setter functions for the ETSI ITS Common Data Dictionary (CDD) v1.3.1 and v2.1.1.
Definition in file cdd_setters_common.h.
Function Documentation
◆ confidenceEllipseFromCovMatrix()
|
inline |
Gets the values needed to set a confidence ellipse from a covariance matrix.
- Parameters
-
covariance_matrix The four values of the covariance matrix in the order: cov_xx, cov_xy, cov_yx, cov_yy The matrix has to be SPD, otherwise a std::invalid_argument exception is thrown. Its coordinate system is aligned with the object (x = longitudinal, y = lateral) object_heading The heading of the object in rad, with respect to WGS84
- Returns
- std::tuple<double, double, double> semi_major_axis [m], semi_minor_axis [m], orientation [deg], with respect to WGS84
Definition at line 319 of file cdd_setters_common.h.
◆ confidenceEllipseFromWGSCovMatrix()
|
inline |
Gets the values needed to set a confidence ellipse from a covariance matrix.
- Parameters
-
covariance_matrix The four values of the covariance matrix in the order: cov_xx, cov_xy, cov_yx, cov_yy The matrix has to be SPD, otherwise a std::invalid_argument exception is thrown. Its coordinate system is aligned with the WGS axes (x = North, y = East) object_heading The heading of the object in rad, with respect to WGS84
- Returns
- std::tuple<double, double, double> semi_major_axis [m], semi_minor_axis [m], orientation [deg], with respect to WGS84
Definition at line 360 of file cdd_setters_common.h.
◆ setAccelerationConfidence()
|
inline |
Set the Acceleration Confidence object.
- Parameters
-
accel_confidence object to set value standard deviation in m/s^2 as decimal number
Definition at line 163 of file cdd_setters_common.h.
◆ setAltitude()
|
inline |
Set the Altitude object.
AltitudeConfidence is set to UNAVAILABLE
- Parameters
-
altitude object to set value Altitude value (above the reference ellipsoid surface) in meter as decimal number
Definition at line 109 of file cdd_setters_common.h.
◆ setAltitudeValue()
|
inline |
Set the AltitudeValue object.
- Parameters
-
altitude object to set value AltitudeValue value (above the reference ellipsoid surface) in meter as decimal number
Definition at line 90 of file cdd_setters_common.h.
◆ setFromUTMPosition()
|
inline |
Set the ReferencePosition from a given UTM-Position.
The position is transformed to latitude and longitude by using GeographicLib::UTMUPS The z-Coordinate is directly used as altitude value The frame_id of the given utm_position must be set to 'utm_<zone><N/S>'
- Parameters
-
[out] reference_position ReferencePostion or ReferencePositionWithConfidence to set [in] utm_position geometry_msgs::PointStamped describing the given utm position [in] zone the UTM zone (zero means UPS) of the given position [in] northp hemisphere (true means north, false means south)
Definition at line 211 of file cdd_setters_common.h.
◆ setHeadingCDD()
| void setHeadingCDD | ( | Heading & | heading, |
| const double | value, | ||
| double | confidence = std::numeric_limits<double>::infinity() |
||
| ) |
Set the Heading object.
0.0° equals WGS84 North, 90.0° equals WGS84 East, 180.0° equals WGS84 South and 270.0° equals WGS84 West HeadingConfidence is set to UNAVAILABLE
- Parameters
-
heading object to set value Heading value in degree as decimal number confidence standard deviation of heading in degree as decimal number (default: infinity, mapping to HeadingConfidence::UNAVAILABLE)
Definition at line 270 of file cdd_setters_common.h.
◆ setHeadingConfidence()
|
inline |
Set the Heading Confidence object.
- Parameters
-
heading_confidence object to set value standard deviation of heading in degree as decimal number
Definition at line 249 of file cdd_setters_common.h.
◆ setHeadingValue()
|
inline |
Set the HeadingValue object.
0.0° equals WGS84 North, 90.0° equals WGS84 East, 180.0° equals WGS84 South and 270.0° equals WGS84 West
- Parameters
-
heading object to set value Heading value in degree as decimal number
Definition at line 236 of file cdd_setters_common.h.
◆ setLatitude()
|
inline |
Set the Latitude object.
- Parameters
-
latitude object to set deg Latitude value in degree as decimal number
Definition at line 66 of file cdd_setters_common.h.
◆ setLongitude()
|
inline |
Set the Longitude object.
- Parameters
-
longitude object to set deg Longitude value in degree as decimal number
Definition at line 78 of file cdd_setters_common.h.
◆ setPosConfidenceEllipse() [1/2]
|
inline |
Set the Pos Confidence Ellipse object.
- Parameters
-
[out] position_confidence_ellipse The PosConfidenceEllipse to set [in] semi_major_axis length of the semi-major axis in meters [in] semi_minor_axis length of the semi-minor axis in meters [in] orientation of the semi-major axis in degrees, with respect to WGS84
Definition at line 303 of file cdd_setters_common.h.
◆ setPosConfidenceEllipse() [2/2]
|
inline |
Set the Pos Confidence Ellipse object.
- Parameters
-
position_confidence_ellipse covariance_matrix The four values of the covariance matrix in the order: cov_xx, cov_xy, cov_yx, cov_yy The matrix has to be SPD, otherwise a std::invalid_argument exception is thrown. Its coordinate system is aligned with the object (x = longitudinal, y = lateral) object_heading The heading of the object in rad, with respect to WGS84
Definition at line 376 of file cdd_setters_common.h.
◆ setReferencePosition()
|
inline |
Sets the reference position in the given ReferencePostion object.
This function sets the latitude, longitude, and altitude of the reference position. If the altitude is not provided, it is set to AltitudeValue::UNAVAILABLE.
- Parameters
-
ref_position ReferencePostion or ReferencePositionWithConfidence object to set the reference position in. latitude The latitude value position in degree as decimal number. longitude The longitude value in degree as decimal number. altitude The altitude value (above the reference ellipsoid surface) in meter as decimal number (optional).
Definition at line 185 of file cdd_setters_common.h.
◆ setSemiAxis()
|
inline |
Set the Semi Axis length.
// See https://godbolt.org/z/Eceavfo99 on how the OneCentimeterHelper works with this template
- Parameters
-
semi_axis_length The SemiAxisLength to set length the desired length in meters
Definition at line 284 of file cdd_setters_common.h.
◆ setSpeed()
|
inline |
Set the Speed object.
SpeedConfidence is set to UNAVAILABLE
- Parameters
-
speed object to set value Speed in in m/s as decimal number confidence standard deviation in m/s as decimal number (Optional. Default is std::numeric_limits<double>::infinity(), mapping to SpeedConfidence::UNAVAILABLE)
Definition at line 151 of file cdd_setters_common.h.
◆ setSpeedConfidence()
|
inline |
Set the Speed Confidence object.
- Parameters
-
speed_confidence object to set value standard deviation in m/s as decimal number
Definition at line 132 of file cdd_setters_common.h.
◆ setSpeedValue()
|
inline |
Set the SpeedValue object.
- Parameters
-
speed object to set value SpeedValue in m/s as decimal number
Definition at line 120 of file cdd_setters_common.h.
◆ setTimestampITS()
|
inline |
Set the TimestampITS object.
- Parameters
-
[in] timestamp_its TimestampITS object to set the timestamp [in] unix_nanosecs Unix-Nanoseconds to set the timestamp for [in] n_leap_seconds Number of leap-seconds since 2004. (Defaults to the todays number of leap seconds since 2004.) [in] epoch_offset Unix-Timestamp in seconds for the 01.01.2004 at 00:00:00
Definition at line 52 of file cdd_setters_common.h.
◆ setWGSPosConfidenceEllipse()
|
inline |
Set the Pos Confidence Ellipse object.
- Parameters
-
position_confidence_ellipse covariance_matrix The four values of the covariance matrix in the order: cov_xx, cov_xy, cov_yx, cov_yy The matrix has to be SPD, otherwise a std::invalid_argument exception is thrown. Its coordinate system is aligned with the WGS axes (x = North, y = East) object_heading The heading of the object in rad, with respect to WGS84
Definition at line 391 of file cdd_setters_common.h.