Common setter functions for the ETSI ITS CAM (EN and TS) More...
#include <etsi_its_msgs_utils/impl/checks.h>#include <etsi_its_msgs_utils/impl/constants.h>#include <etsi_its_msgs_utils/impl/asn1_primitives/asn1_primitives_setters.h>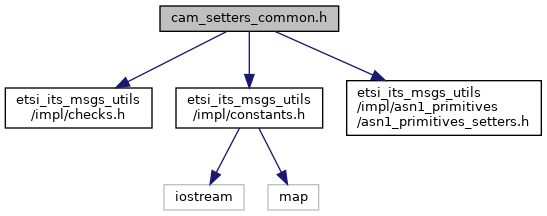
Go to the source code of this file.
Functions | |
| void | setAccelerationControl (AccelerationControl &acceleration_control, const std::vector< bool > &bits) |
| Set the Acceleration Control by a vector of bools. More... | |
| void | setDrivingLaneStatus (DrivingLaneStatus &driving_lane_status, const std::vector< bool > &bits) |
| Set the Driving Lane Status by a vector of bools. More... | |
| void | setEmergencyPriority (EmergencyPriority &emergency_priority, const std::vector< bool > &bits) |
| Set the Emergency Priority by a vector of bools. More... | |
| void | setExteriorLights (CAM &cam, const std::vector< bool > &exterior_lights) |
| Set the Exterior Lights by using a vector of bools. More... | |
| void | setExteriorLights (ExteriorLights &exterior_lights, const std::vector< bool > &bits) |
| Set the Exterior Lights by a vector of bools. More... | |
| void | setFromUTMPosition (CAM &cam, const gm::PointStamped &utm_position, const int &zone, const bool &northp) |
| Set the ReferencePosition of a CAM from a given UTM-Position. More... | |
| void | setGenerationDeltaTime (CAM &cam, const uint64_t unix_nanosecs, const uint16_t n_leap_seconds=etsi_its_msgs::LEAP_SECOND_INSERTIONS_SINCE_2004.rbegin() ->second) |
| Set the Generation Delta Time object. More... | |
| void | setGenerationDeltaTime (GenerationDeltaTime &generation_delta_time, const uint64_t unix_nanosecs, const uint16_t n_leap_seconds=etsi_its_msgs::LEAP_SECOND_INSERTIONS_SINCE_2004.rbegin() ->second) |
| Set the GenerationDeltaTime-Value. More... | |
| void | setHeading (CAM &cam, const double heading_val, const double confidence=std::numeric_limits< double >::infinity()) |
| Set the Heading for a CAM. More... | |
| void | setLateralAcceleration (CAM &cam, const double lat_accel, const double confidence=std::numeric_limits< double >::infinity()) |
| Set the lateral acceleration. More... | |
| void | setLightBarSirenInUse (LightBarSirenInUse &light_bar_siren_in_use, const std::vector< bool > &bits) |
| Set the Lightbar Siren In Use by a vector of bools. More... | |
| void | setLongitudinalAcceleration (CAM &cam, const double lon_accel, const double confidence=std::numeric_limits< double >::infinity()) |
| Set the longitudinal acceleration. More... | |
| void | setReferencePosition (CAM &cam, const double latitude, const double longitude, const double altitude=AltitudeValue::UNAVAILABLE) |
| Set the ReferencePosition for a CAM. More... | |
| void | setSpecialTransportType (SpecialTransportType &special_transport_type, const std::vector< bool > &bits) |
| Set the Special Transport Type by a vector of bools. More... | |
| void | setSpeed (CAM &cam, const double speed_val, const double confidence=SpeedConfidence::UNAVAILABLE) |
| Set the vehicle speed. More... | |
| void | setStationType (CAM &cam, const uint8_t value) |
| Set the StationType for a CAM. More... | |
| void | setVehicleDimensions (CAM &cam, const double vehicle_length, const double vehicle_width) |
| Set the vehicle dimensions. More... | |
| void | setVehicleLength (VehicleLength &vehicle_length, const double value) |
| Set the VehicleLength object. More... | |
| void | setVehicleLengthValue (VehicleLengthValue &vehicle_length, const double value) |
| Set the VehicleLengthValue object. More... | |
| void | setVehicleWidth (VehicleWidth &vehicle_width, const double value) |
| Set the VehicleWidth object. More... | |
Detailed Description
Common setter functions for the ETSI ITS CAM (EN and TS)
Definition in file cam_setters_common.h.
Function Documentation
◆ setAccelerationControl()
|
inline |
Set the Acceleration Control by a vector of bools.
- Parameters
-
acceleration_control bits
Definition at line 259 of file cam_setters_common.h.
◆ setDrivingLaneStatus()
|
inline |
Set the Driving Lane Status by a vector of bools.
- Parameters
-
driving_lane_status bits
Definition at line 269 of file cam_setters_common.h.
◆ setEmergencyPriority()
|
inline |
Set the Emergency Priority by a vector of bools.
- Parameters
-
emergency_priority bits
Definition at line 299 of file cam_setters_common.h.
◆ setExteriorLights() [1/2]
|
inline |
Set the Exterior Lights by using a vector of bools.
- Parameters
-
cam CAM to set the exterior lights exterior_lights vector of bools to set the exterior lights
Definition at line 234 of file cam_setters_common.h.
◆ setExteriorLights() [2/2]
|
inline |
Set the Exterior Lights by a vector of bools.
- Parameters
-
exterior_lights bits
Definition at line 224 of file cam_setters_common.h.
◆ setFromUTMPosition()
|
inline |
Set the ReferencePosition of a CAM from a given UTM-Position.
The position is transformed to latitude and longitude by using GeographicLib::UTMUPS The z-Coordinate is directly used as altitude value The frame_id of the given utm_position must be set to 'utm_<zone><N/S>'
- Parameters
-
[out] cam CAM for which to set the ReferencePosition [in] utm_position geometry_msgs::PointStamped describing the given utm position [in] zone the UTM zone (zero means UPS) of the given position [in] northp hemisphere (true means north, false means south)
Definition at line 214 of file cam_setters_common.h.
◆ setGenerationDeltaTime() [1/2]
|
inline |
Set the Generation Delta Time object.
- Parameters
-
cam CAM to set the GenerationDeltaTime-Value for unix_nanosecs Timestamp in unix-nanoseconds to set the GenerationDeltaTime-Value from n_leap_seconds Number of leap seconds since 2004 for the given timestamp (Defaults to the todays number of leap seconds since 2004.)
Definition at line 63 of file cam_setters_common.h.
◆ setGenerationDeltaTime() [2/2]
|
inline |
Set the GenerationDeltaTime-Value.
- Parameters
-
generation_delta_time GenerationDeltaTime to set the GenerationDeltaTime-Value for unix_nanosecs Timestamp in unix-nanoseconds to set the GenerationDeltaTime-Value from n_leap_seconds Number of leap seconds since 2004 for the given timestamp (Defaults to the todays number of leap seconds since 2004.)
Definition at line 46 of file cam_setters_common.h.
◆ setHeading()
|
inline |
Set the Heading for a CAM.
0.0° equals WGS84 North, 90.0° equals WGS84 East, 180.0° equals WGS84 South and 270.0° equals WGS84 West HeadingConfidence is set to UNAVAILABLE
- Parameters
-
cam CAM to set the ReferencePosition value Heading value in degree as decimal number confidence standard deviation of heading in degree as decimal number (default: infinity, mapping to HeadingConfidence::UNAVAILABLE)
Definition at line 89 of file cam_setters_common.h.
◆ setLateralAcceleration()
|
inline |
Set the lateral acceleration.
- Parameters
-
cam CAM to set the acceleration value s lat_accel lateral acceleration to set in m/s^2 as decimal number (left is positiv), if not available use 16.1 m/s^2 confidence standard deviation of the lateral acceleration in m/s^2 as decimal number Default is infinity, mapping to AccelerationConfidence::UNAVAILABLE
Definition at line 178 of file cam_setters_common.h.
◆ setLightBarSirenInUse()
|
inline |
Set the Lightbar Siren In Use by a vector of bools.
- Parameters
-
light_bar_siren_in_use bits
Definition at line 289 of file cam_setters_common.h.
◆ setLongitudinalAcceleration()
|
inline |
Set the longitudinal acceleration.
- Parameters
-
cam CAM to set the acceleration value s lon_accel longitudinal acceleration to set in m/s^2 as decimal number (braking is negative), if not available use 16.1 m/s^2 confidence standard deviation of the longitudinal acceleration in m/s^2 as decimal number Default is infinity, mapping to AccelerationConfidence::UNAVAILABLE
Definition at line 164 of file cam_setters_common.h.
◆ setReferencePosition()
|
inline |
Set the ReferencePosition for a CAM.
This function sets the latitude, longitude, and altitude of the CAMs reference position. If the altitude is not provided, it is set to AltitudeValue::UNAVAILABLE.
- Parameters
-
cam CAM to set the ReferencePosition latitude The latitude value position in degree as decimal number. longitude The longitude value in degree as decimal number. altitude The altitude value (above the reference ellipsoid surface) in meter as decimal number (optional).
Definition at line 197 of file cam_setters_common.h.
◆ setSpecialTransportType()
|
inline |
Set the Special Transport Type by a vector of bools.
- Parameters
-
special_transport_type bits
Definition at line 279 of file cam_setters_common.h.
◆ setSpeed()
|
inline |
Set the vehicle speed.
- Parameters
-
cam CAM to set the speed value speed_val speed value to set in m/s as decimal number
Definition at line 152 of file cam_setters_common.h.
◆ setStationType()
|
inline |
Set the StationType for a CAM.
- Parameters
-
cam CAM-Message to set the station_type value value station_type value to set
Definition at line 75 of file cam_setters_common.h.
◆ setVehicleDimensions()
|
inline |
Set the vehicle dimensions.
- Parameters
-
cam CAM to set the vehicle dimensions vehicle_length vehicle length in meter as decimal number vehicle_width vehicle width in meter as decimal number
Definition at line 138 of file cam_setters_common.h.
◆ setVehicleLength()
|
inline |
Set the VehicleLength object.
VehicleLengthConfidenceIndication is set to UNAVAILABLE
- Parameters
-
vehicle_length object to set value VehicleLengthValue in meter as decimal number
Definition at line 126 of file cam_setters_common.h.
◆ setVehicleLengthValue()
|
inline |
Set the VehicleLengthValue object.
- Parameters
-
vehicle_length object to set value VehicleLengthValue in meter as decimal number
Definition at line 112 of file cam_setters_common.h.
◆ setVehicleWidth()
|
inline |
Set the VehicleWidth object.
- Parameters
-
vehicle_width object to set value VehicleWidth in meter as decimal number
Definition at line 100 of file cam_setters_common.h.