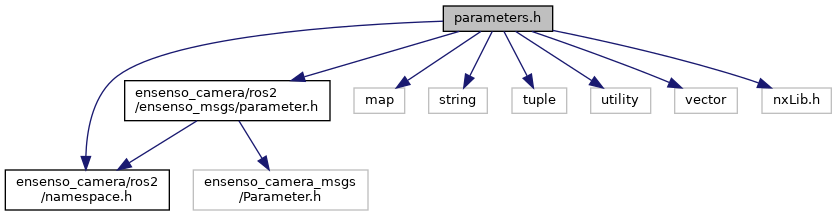
#include "ensenso_camera/ros2/namespace.h"
#include "ensenso_camera/ros2/ensenso_msgs/parameter.h"
#include <map>
#include <string>
#include <tuple>
#include <utility>
#include <vector>
#include "nxLib.h"
Go to the source code of this file.
◆ ParameterType
Possible types of parameters that are mapped to nodes of the NxLib.
| Enumerator |
|---|
| Bool | |
| Number | |
| String | |
Definition at line 18 of file parameters.h.
◆ parameterExists()
| bool parameterExists |
( |
std::string const & |
key | ) |
|
|
inline |
◆ parameterInformation
Map ROS parameters (as defined in ensenso_camera_msgs/Parameter) to NxLib nodes.
Note that there are other parameters that cannot be mapped directly to an NxLib node. These are handled in the parameter reading and writing methods of the camera class.
Definition at line 53 of file parameters.h.