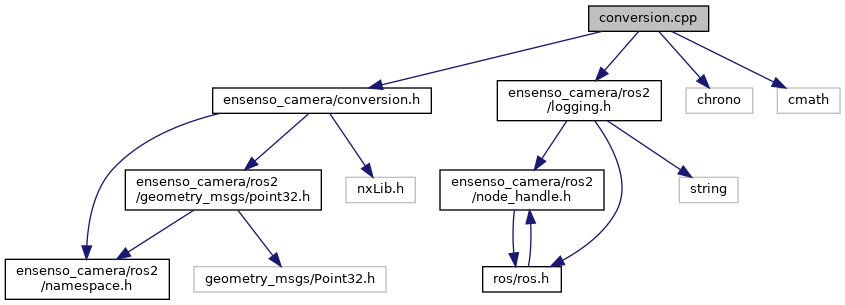
#include "ensenso_camera/conversion.h"#include "ensenso_camera/ros2/logging.h"#include <chrono>#include <cmath>
Include dependency graph for conversion.cpp:
Go to the source code of this file.
Namespaces | |
| ensenso_conversion | |
Functions | |
| double | ensenso_conversion::nxLibToPclTimestamp (double const ×tamp, bool isFileCamera=false) |
| double | ensenso_conversion::nxLibToRosTimestamp (double const ×tamp, bool isFileCamera=false) |
| NxLibItem | ensenso_conversion::toEnsensoPoint (geometry_msgs::msg::Point32 const &point, bool convertUnits=true) |
| geometry_msgs::msg::Point32 | ensenso_conversion::toRosPoint (NxLibItem const &itemArray, bool convertUnits=true) |