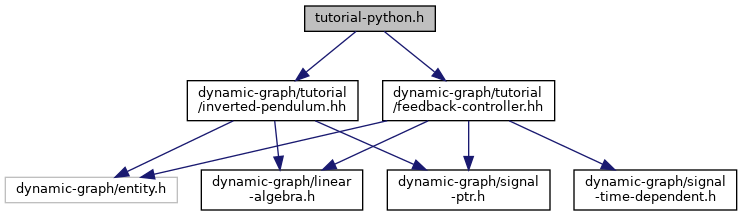
#include "dynamic-graph/tutorial/feedback-controller.hh"#include "dynamic-graph/tutorial/inverted-pendulum.hh"
Include dependency graph for tutorial-python.h:
Go to the source code of this file.
Typedefs | |
| typedef boost::mpl::vector< dynamicgraph::tutorial::FeedbackController, dynamicgraph::tutorial::InvertedPendulum > | entities_t |
Typedef Documentation
◆ entities_t
| typedef boost::mpl::vector<dynamicgraph::tutorial::FeedbackController, dynamicgraph::tutorial::InvertedPendulum> entities_t |
Definition at line 6 of file tutorial-python.h.