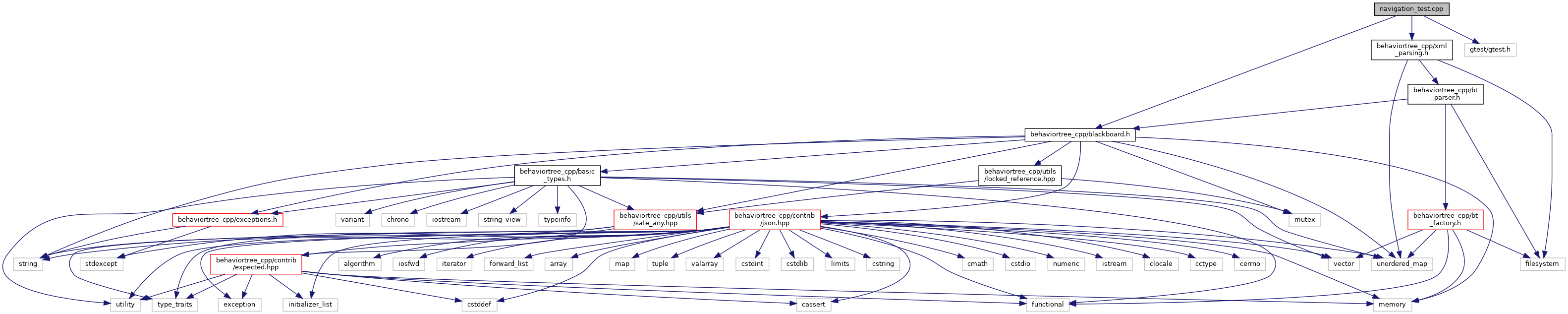
#include "behaviortree_cpp/xml_parsing.h"#include "behaviortree_cpp/blackboard.h"#include <gtest/gtest.h>
Include dependency graph for navigation_test.cpp:
Go to the source code of this file.
Classes | |
| class | BackUpAndSpin |
| class | ComputePathToPose |
| class | FollowPath |
| class | IsStuck |
| class | TestNode |
Typedefs | |
| using | Milliseconds = std::chrono::milliseconds |
Functions | |
| std::chrono::high_resolution_clock::time_point | Now () |
| TEST (Navigationtest, MoveBaseRecovery) | |
| template<typename Original , typename Casted > | |
| void | TryDynamicCastPtr (Original *ptr, Casted *&destination) |
Variables | |
| static const char * | xml_text |
Typedef Documentation
◆ Milliseconds
| using Milliseconds = std::chrono::milliseconds |
Definition at line 36 of file navigation_test.cpp.
Function Documentation
◆ Now()
|
inline |
Definition at line 38 of file navigation_test.cpp.
◆ TEST()
| TEST | ( | Navigationtest | , |
| MoveBaseRecovery | |||
| ) |
Definition at line 175 of file navigation_test.cpp.
◆ TryDynamicCastPtr()
template<typename Original , typename Casted >
| void TryDynamicCastPtr | ( | Original * | ptr, |
| Casted *& | destination | ||
| ) |
Definition at line 165 of file navigation_test.cpp.
Variable Documentation
◆ xml_text
|
static |
Initial value:
= R"(
<root BTCPP_format="4" main_tree_to_execute="BehaviorTree">
<BehaviorTree ID="BehaviorTree">
<Fallback name="root">
<ReactiveSequence name="navigation_subtree">
<Inverter>
<Condition ID="IsStuck"/>
</Inverter>
<SequenceWithMemory name="navigate">
<Action ID="ComputePathToPose"/>
<Action ID="FollowPath"/>
</SequenceWithMemory>
</ReactiveSequence>
<SequenceWithMemory name="stuck_recovery">
<Condition ID="IsStuck"/>
<Action ID="BackUpAndSpin"/>
</SequenceWithMemory>
</Fallback>
</BehaviorTree>
</root>
)"
Definition at line 8 of file navigation_test.cpp.