#include "tmcl_interpreter.h"#include <ros/ros.h>#include <ros/console.h>#include "adi_tmcl/TmcInfo.h"#include "geometry_msgs/Twist.h"#include "std_msgs/Int32.h"#include "std_msgs/String.h"
Include dependency graph for tmcl_motor.h:

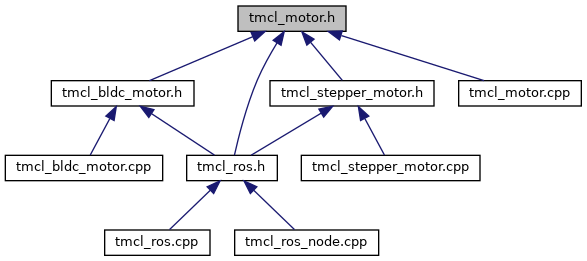
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Motor |
Variables | |
| const uint16_t | ANGULAR_FULL_ROTATION = 360 |
| const double | PI = 3.1415926535 |
| const uint8_t | SECS_TO_MIN = 60 |
Variable Documentation
◆ ANGULAR_FULL_ROTATION
| const uint16_t ANGULAR_FULL_ROTATION = 360 |
Definition at line 24 of file tmcl_motor.h.
◆ PI
| const double PI = 3.1415926535 |
Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
Definition at line 20 of file tmcl_motor.h.
◆ SECS_TO_MIN
| const uint8_t SECS_TO_MIN = 60 |
Definition at line 21 of file tmcl_motor.h.