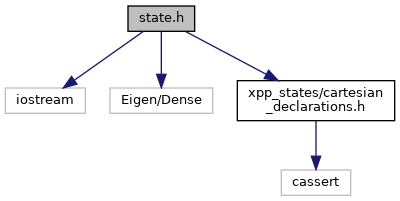
Include dependency graph for state.h:
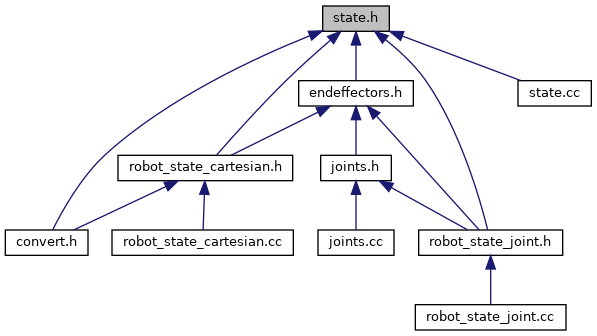
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | xpp::State3d |
| 6D-State (linear+angular) of an object in 3-dimensional space, where the angular part is expressed by a Quaternion. More... | |
| class | xpp::State3dEuler |
| 6D-state (linear+angular) of an object in 3-dimensional space, where the angular part is expressed by Euler angles. More... | |
| class | xpp::StateAng3d |
| Angular state of an object in 3-dimensional space. More... | |
| class | xpp::StateLin1d |
| class | xpp::StateLin2d |
| class | xpp::StateLin3d |
| class | xpp::StateLinXd |
| Represents position, velocity and acceleration in x-dimensions. More... | |
Namespaces | |
| xpp | |
Typedefs | |
| using | xpp::Quaterniond = Eigen::Quaterniond |
| using | xpp::Vector2d = Eigen::Vector2d |
| using | xpp::Vector3d = Eigen::Vector3d |
| using | xpp::Vector6d = Eigen::Matrix< double, 6, 1 > |
| using | xpp::VectorXd = Eigen::VectorXd |
Enumerations | |
| enum | xpp::MotionDerivative { xpp::kPos =0, xpp::kVel, xpp::kAcc, xpp::kJerk } |
Functions | |
| static Vector3d | xpp::GetEulerZYXAngles (const Quaterniond &q) |
| Converts an orientation to Euler ZY'X'' convention. More... | |
| static Quaterniond | xpp::GetQuaternionFromEulerZYX (double yaw, double pitch, double roll) |
| Converts an orientation to Quaternion from Euler ZY'X'' convention. More... | |
| StateLinXd | xpp::operator* (double mult, const StateLinXd &rhs) |
| StateLinXd | xpp::operator+ (const StateLinXd &lhs, const StateLinXd &rhs) |
| std::ostream & | xpp::operator<< (std::ostream &out, const StateLinXd &pos) |
| std::ostream & | xpp::operator<< (std::ostream &out, const StateAng3d &ori) |
| std::ostream & | xpp::operator<< (std::ostream &out, const State3d &pose) |