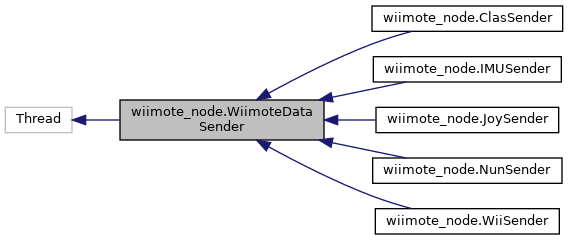
Inheritance diagram for wiimote_node.WiimoteDataSender:
Public Member Functions | |
| def | __init__ (self, wiiMote, freq=100) |
| def | canonicalizeWiistate (self) |
| def | obtainWiimoteData (self) |
Public Attributes | |
| angular_velocity_covariance | |
| freq | |
| gyroAbsence_covariance | |
| linear_acceleration_covariance | |
| sleepDuration | |
| wiiMote | |
| wiistate | |
Detailed Description
Definition at line 141 of file wiimote_node.py.
Constructor & Destructor Documentation
◆ __init__()
| def wiimote_node.WiimoteDataSender.__init__ | ( | self, | |
| wiiMote, | |||
freq = 100 |
|||
| ) |
Definition at line 142 of file wiimote_node.py.
Member Function Documentation
◆ canonicalizeWiistate()
| def wiimote_node.WiimoteDataSender.canonicalizeWiistate | ( | self | ) |
Scale accelerator, nunchuk accelerator, and gyro readings to be m/sec^2, m/sec^2 and radians/sec, respectively.
Definition at line 186 of file wiimote_node.py.
◆ obtainWiimoteData()
| def wiimote_node.WiimoteDataSender.obtainWiimoteData | ( | self | ) |
Retrieve one set of Wiimote measurements from the Wiimote instance. Return scaled accelerator and gyro readings. We canonicalize both accelerator and gyro data through scaling them by constants that turn them into m/sec^2, and radians/sec, respectively. Return: list of canonicalized accelerator and gyro readings.
Definition at line 165 of file wiimote_node.py.
Member Data Documentation
◆ angular_velocity_covariance
| wiimote_node.WiimoteDataSender.angular_velocity_covariance |
Definition at line 154 of file wiimote_node.py.
◆ freq
| wiimote_node.WiimoteDataSender.freq |
Definition at line 145 of file wiimote_node.py.
◆ gyroAbsence_covariance
| wiimote_node.WiimoteDataSender.gyroAbsence_covariance |
Definition at line 161 of file wiimote_node.py.
◆ linear_acceleration_covariance
| wiimote_node.WiimoteDataSender.linear_acceleration_covariance |
Definition at line 149 of file wiimote_node.py.
◆ sleepDuration
| wiimote_node.WiimoteDataSender.sleepDuration |
Definition at line 146 of file wiimote_node.py.
◆ wiiMote
| wiimote_node.WiimoteDataSender.wiiMote |
Definition at line 144 of file wiimote_node.py.
◆ wiistate
| wiimote_node.WiimoteDataSender.wiistate |
Definition at line 178 of file wiimote_node.py.
The documentation for this class was generated from the following file: