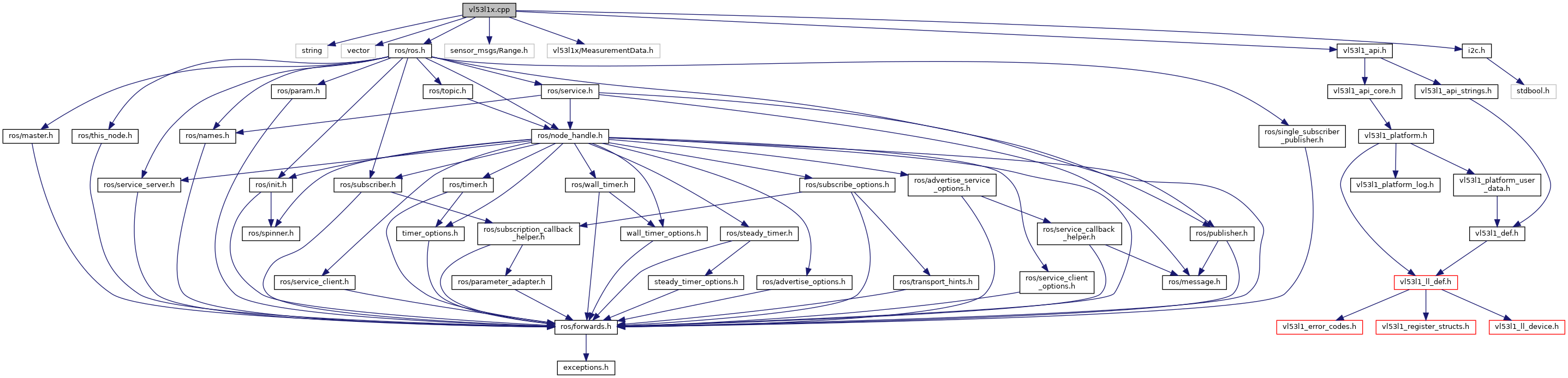
#include <string>#include <vector>#include <ros/ros.h>#include <sensor_msgs/Range.h>#include <vl53l1x/MeasurementData.h>#include "vl53l1_api.h"#include "i2c.h"
Include dependency graph for vl53l1x.cpp:
Go to the source code of this file.
Macros | |
| #define | CHECK_STATUS(func) |
| #define | STR(x) xSTR(x) |
| #define | xSTR(x) #x |
Functions | |
| int | main (int argc, char **argv) |
Macro Definition Documentation
◆ CHECK_STATUS
| #define CHECK_STATUS | ( | func | ) |
Value:
{ \
VL53L1_Error status = func; \
if (status != VL53L1_ERROR_NONE) { \
ROS_WARN("VL53L1X: Error %d on %s", status, STR(func)); \
} \
}
Definition at line 26 of file vl53l1x.cpp.
◆ STR
| #define STR | ( | x | ) | xSTR(x) |
Definition at line 24 of file vl53l1x.cpp.
◆ xSTR
| #define xSTR | ( | x | ) | #x |
Definition at line 23 of file vl53l1x.cpp.
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 33 of file vl53l1x.cpp.